Hello,
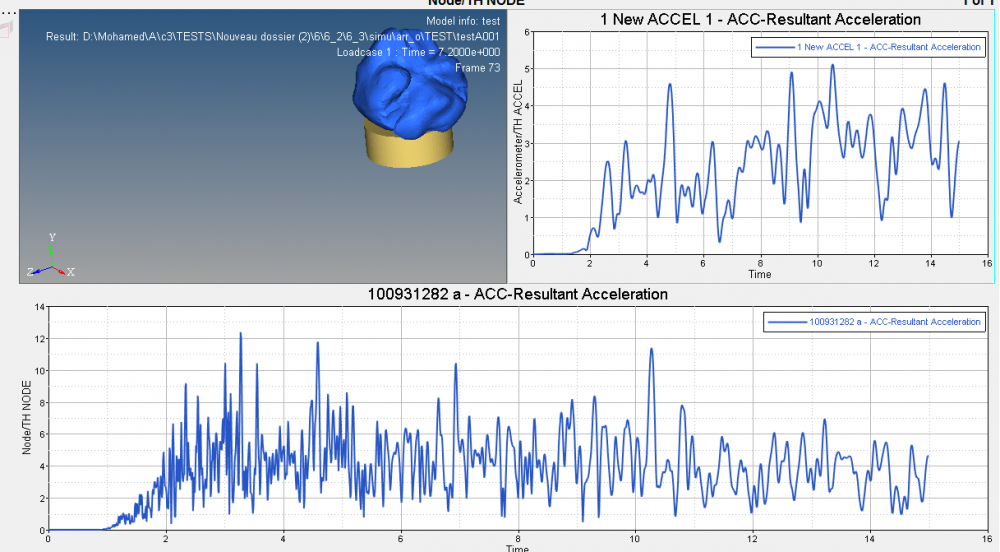
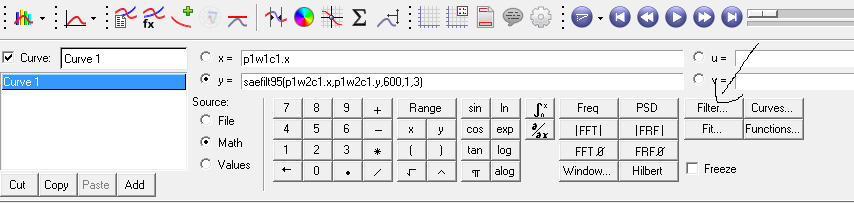
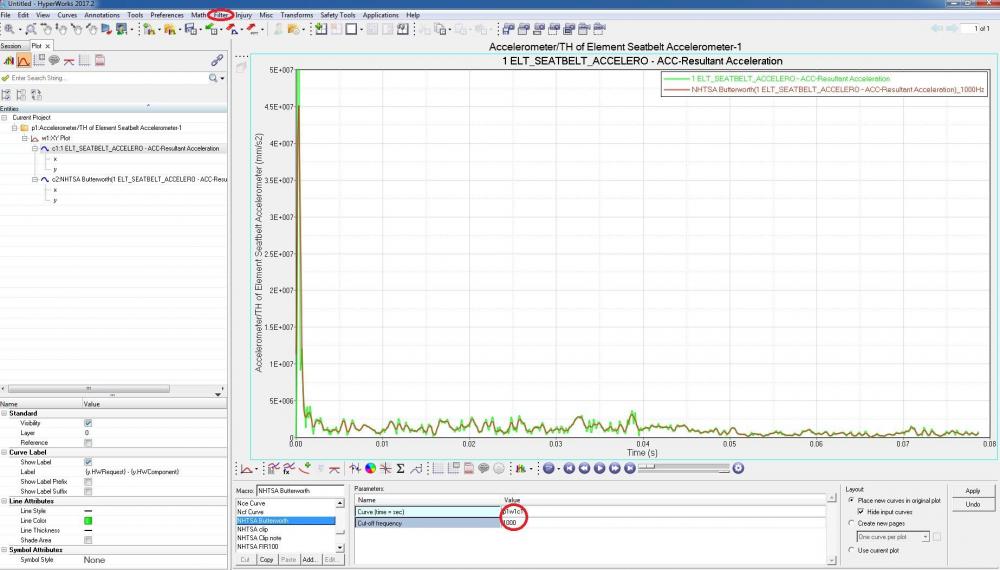
I try to read the angular acceleration using TH/Node because I can't do it with accelerometer TH/ACCEL (there is only the linear acceleration). So i try first to see the linear acceleration on the same node using both (Th/node and TH/accel) to see if i have the same result but i don't. I read that there is some filter to use but i didn't find it (i have v13 version).
Thank you for your help! (Sorry if it's not clear i don't speak english very well  /emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20' />
/emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20' />
<?xml version="1.0" encoding="UTF-8"?>