Overview:
The vehicle library within Motionview contains a vast amount of verification tests, however there will come a time where a unique event needs to be simulated. In order to do this, we can generate our own Altair Driver Files (ADF) to simulate the task! This post will go over two different types of steering events that were scripted in an ADF file.
Release Version:
MotionView/MotionSolve (v2025)
Model Files:
The adfs are saved in .txt format. Please resave the files as an .adf file.
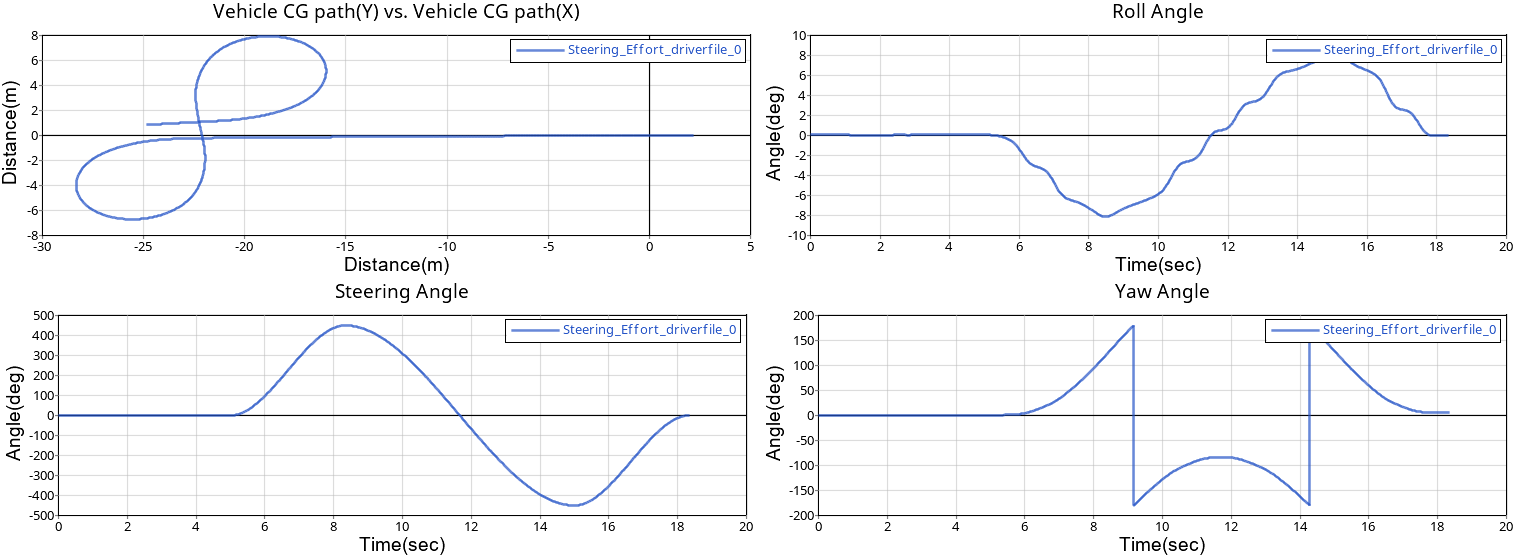
Scenario 1: Steer Effort "Figure 8 Event"
The use case is to simulate the steering effort of the vehicle when the vehicle starts at 5 mph and accelerates to 8 mph. Once the vehicle has reached the requested speed, a steering rate of 135 deg/sec is applied to the steering wheel until the max lock of 450 degrees is achieved. Once max lock is reached, the steering motion is reversed until the opposite lock position is achieved. Once that is achieved, the steering input is reversed again until the steer angle is back to the start position (0 degrees).
The units that are used in the ADF file:

The ADF has the vehicle starting off at 5 mph:

Four maneuvers are needed.
The first maneuver accelerates the vehicle to 8 mph.
The second maneuver turns the steering wheel at 135 deg/sec. Simulation time is 3.333 seconds, since it will take that long to reach 450 degrees.
The third maneuver turns the steering wheel 135 deg/sec in the opposite direction to -450 degrees. The simulation time is 6.666 seconds.
The last maneuver turns the steering wheel at 135 deg/sec until the start position is reached.

The first maneuver uses a step function to ramp the velocity from the initial velocity the vehicle is at the start of the maneuver (LONG_VEL), to 8 mph in 5 seconds (Demand_VEL block). In addition, the steering is locked (OL_STEER_0).

Once the second maneuver is activated, the velocity is kept constant {DEMAND_VEL1 block}. While the steering {OL_STEER_1} is updated through a Step function. Based on the starting time of the maneuver (%TIME), the steering angle is ramped up from 0 to 450 degrees in 3.333 seconds (steering rate of 135 deg/sec).

The third and fourth maneuver uses the same velocity as the second maneuver and uses a step function to reverse the steering input.
Results:

Scenario 2: Step Steer Event
The use case is very similar to a J Turn and Step Steer scenario. The vehicle needs to start at an initial velocity of 20 mph and accelerate to 30 mph. Once the vehicle has reached the requested speed, the engine is turned off which allows the vehicle to decelerate. Once the vehicles speed reaches 27 mph, an steering rate of 165 degrees is applied for 0.28 seconds (steering rate of 589 deg/sec). The vehicle holds the steering input, the simulation will end if the roll angle exceeds 0.8 radians or the vehicle’s vehicle speed is less than 5.5 mph.
The units in the ADF file:

The ADF has the vehicle starting off about 20 mph:

Four maneuvers are needed.
The first maneuver accelerates the vehicle to 30 mph.
The second maneuver turns off the engine and allows the vehicle to decelerate to 27 mph.
The third maneuver turns the steering wheel 165 degrees in 0.28 seconds
The last maneuver has the steering wheel held at 165 degrees until the vehicles roll angle exceed 0.8 radians or the vehicle reaches steady state (less than 5.5 mph for this case).

Maneuver 1 has an end condition when the longitudinal velocity (LONG_VEL) of the vehicle exceeds 30 mph. The next maneuver is initiated. The vehicle ramps up from 20 mph to 30 mph (DEMAND_VEL_1 block) and has a steering lock (OL_STEER_1 block).

Maneuver 2 has an end condition when the longitudinal velocity (LONG_VEL) of the vehicle is below 27 mph. The next maneuver is initiated. The throttle from the last maneuver {THROTTLE_0} is turned off in 0.1 seconds (OL_THROTTLE_0 block) and the brake (if applied in the last maneuver {BRAKE_0}) is turned off (OL_BRAKE_0 block).

Maneuver 3 still has the throttled turned off and the steer has a rapid input of 165 degrees in 0.28 seconds (OL_STEER_1 block).

Maneuver 4 holds the steering wheel at 165 degrees and has an end condition if the vehicles longitudinal velocity is less than 5.5 mph or the roll angle of the vehicle exceeds 0.8 radians.

Results:


For more information on Altair Driver Files please visit our help site:
Full Vehicle Events and Altair Driver
Driver Overview
Driver Blocks
Expressions
Want to learn about MotionView? You can access our free online material!
MotionView/MotionSolve Introduction
Vehicle Modeling
Author:
Christopher Fadanelli : Sr. Solutions Engineer
