剛な物体の表現や物体の結合に良く用いられるツールに剛体(/RBODY)があります。これはマスター・スレーブ型運動条件の一つで、独立な自由度であるマスター節点と複数のスレーブ節点の節点群からなります。計算手法としてはまず、独立自由度であるマスター節点で運動方程式が解かれ、スレーブ節点はマスター節点との相対位置が変わらないように強制移動される、という様にして用いられます。剛体の移動をマスター節点でまず代表させる事から、マスター節点については、その節点座標がどこに入力されてもデフォルトでは計算時にその剛体の重心位置に移動されます。これはICoGオプションで変更可能です。
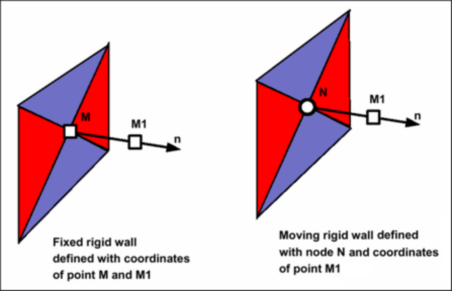
剛壁(/RWALL)も壁面の簡易的なモデル化としてよく用いられますが、これもマスター・スレーブ型運動条件として取り扱われます。固定剛壁であれば、その座標と法線等から規定される面の位置を求め、移動剛壁であればそのマスター節点の運動方程式を解いてその位置を求めて剛壁面を定め、その面を超えたスレーブ節点があれば、表面上まで強制的に引き戻す、という様にして計算されます。剛壁としては無限平面だけでなく、円筒面、球面、平行四辺形面が用意されています。また、移動剛壁では、その質量を与えて運動法手式を解くことで移動も表現できますが、あくまでも併進移動のみで回転は表現できません。
タイドインターフェース(デフォルト)、剛体、剛壁はいずれもマスター・スレーブ型運動条件ですので、そのスレーブ節点はそれぞれの従属自由度になります。従って、この節点に対して、他の運動条件(タイドインターフェースのスレーブ、剛体、剛壁、拘束、強制変位等)が加わると、一つの節点に対して複数の拘束条件が加わったことになり、矛盾(運動条件の非適合:Incompatible Kinematic Conditions)が生じます。これは、指定された拘束条件が無視されたり、時としてとんでもなく大きなエネルギーを生んだりしますので、エラーではなくワーニングですが、注意を払うことが必要です。
<?xml version="1.0" encoding="UTF-8"?>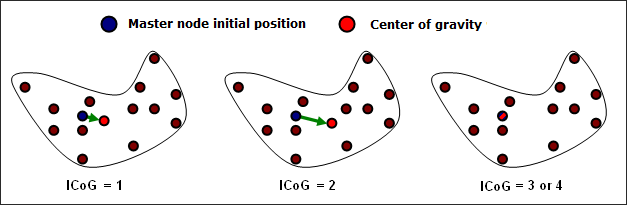
<?xml version="1.0" encoding="UTF-8"?>