Overview

CHALLENGE
Assessing wheel loader components and their performance under real-world load cases involving a comprehensive model incorporating flexible bodies and hydraulic actuators within a co-simulation framework.
PREFACE
A standalone model built using a specific simulation tool holds good for understanding the basic performance of a system. However, adopting a co-simulation or a multi-physics methodology provides more insight into the influence of different parameters and variables affecting the performance of the specified problem domain.
Altair’s Motionsolve or other MBD tools like ADAMS, would provide insights into the dynamics and kinematics of the whole system. But using a 1-D simulation tool like the open and flexible Twin Activate or other tools like MATLAB or Amesim, we can increase the fidelity of the simulation by including more control over the hydraulic actuation of the wheel loader.
INTRODUCTION
Before we build the model in any tool, it’s imperative to understand the construction, the different parts involved, and the terminologies of the domain. A loader is a heavy equipment machine used in construction to move or load materials such as soil, rock, sand, demolition debris, etc. All movement and functions of a wheel loader are accomplished using hydraulic fluid, with hydraulic cylinders and hydraulic motors.

The objective of this study is to examine the practical handling of materials using a hydraulic wheel loader and subsequently loading it onto a truck, with a focus on analyzing the stresses and actuator forces within the involved components. Additionally, the investigation aims to identify hotspot areas for fatigue evaluation. Leveraging Twin Activate for actuator control provides valuable insights into the dynamic responses of the actuators, enriching our understanding of the operational dynamics of the system.
Pre-Requisite
SOFTWARE REQUIREMENTS
- Operating System: Windows
- Altair Products needed: MotionView, MotionSolve and Twin Activate
- Working knowledge of all the above products and knowledge of co-simulation (Use MotionView training to gain familiarity)
MODEL FILES
Wheel_Loader_Model.zip
Usage/Installation Instructions
Understanding the Model Definition in MotionView

The MBD model of the wheel loader has been constructed to allow the wheel loader to pick up a rock and place it in a dump truck. The model could be further developed to pick up bulk materials, including soil.
As shown in the animation, the model features a simple truck design capable of depositing rock once it is picked up. The wheel loader itself has straightforward architecture, utilizing flexible bodies for the boom, connecting rod, and arm. The flexible bodies are imported as a .fem file, which is generated using the FlexPrep tool which is an in-built feature of MotionView. Flexible bodies are deformed under load and allow deflection, stress, and strain to be reviewed in post-processing. A tire model handles interaction with the ground using the magic formula equations to accurately calculate tire dynamics.
Understanding the Hydraulic Actuators Definition in Twin Activate
To execute the designated task, the wheel loader bucket needs to be moved with the help of a hydraulic actuator. This is done with the help of the Twin Activate 1-D model.
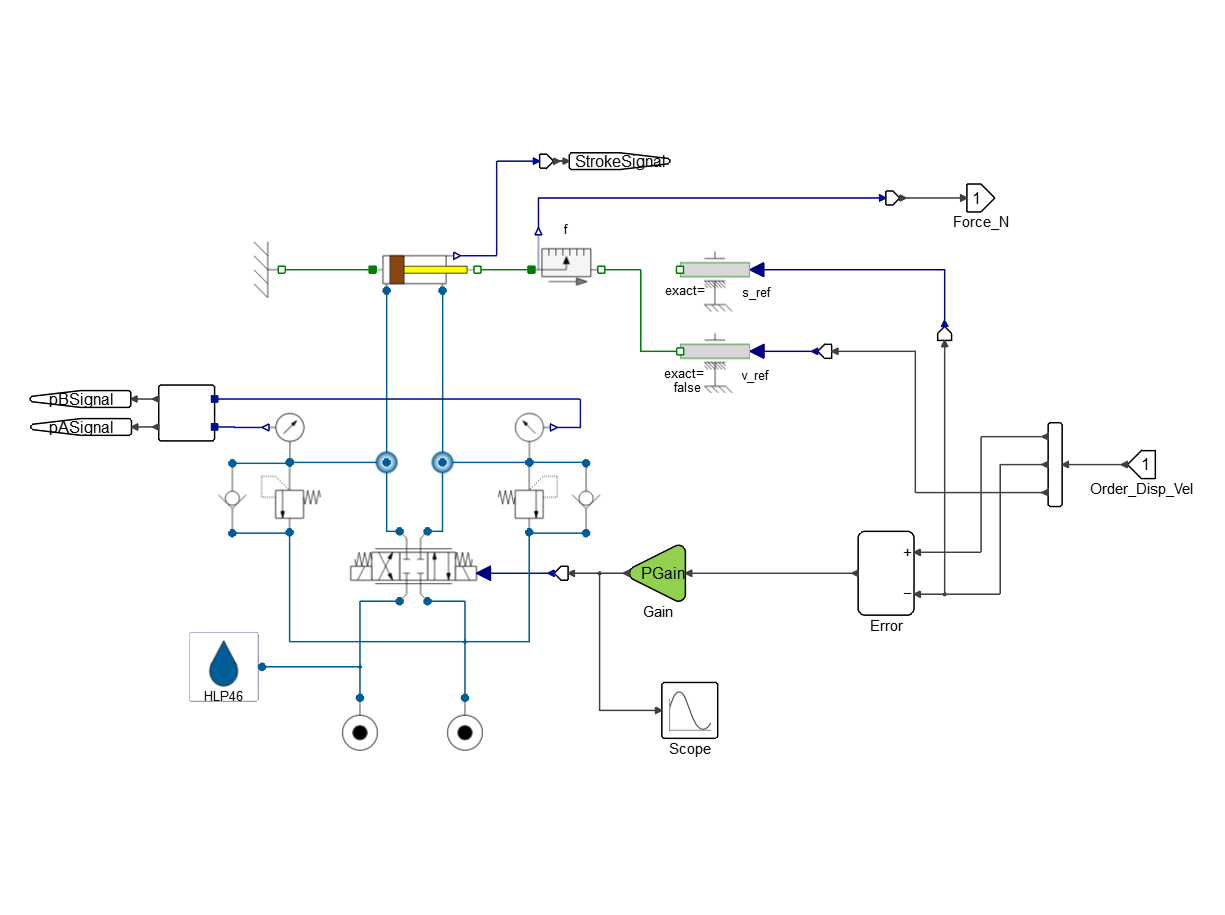
Inputs to the hydraulic controller are the desired position, actual position, and actual velocities. The outputs are the applied hydraulic forces for each actuator.
Once the MotionView model (.mdl) is ready, it can be used as an input in the Twin Activate interface as shown in the below image.

MotionView Modeling Steps
Step 1: Import the CAD data in MotionView and add joints
Step 2: Add Steering motion & Motor motion. Add Motion with value = 0.0 on bucket and boom cylinders. (Needed for Static simulation)
Step 3: Add 4 AutoTires
Step 4: Include the contact between Rock and Ground, Bucket, Dump Truck
Step 5: Using FlexTools create the flexible components of Boom, Connecting Rod, and Rocker Arm
Step 6: Replace the rigid bodies with Flexbodies
Step 7: Set up to connect with Activate
Step 8: Define Solver Arrays for each cylinder
- Plant Input with 1 solver variable resolved to Force.
- Plant Output with solver variables – Desired motion order, displacement, and velocity.
Step 9: Apply Hydraulic force on the cylinder either using a spring damper in the actuator or a Line of Action force
Step 10: Create a Scripted simulation template with a Static Analysis, deactivate joints on the vehicle, deactivate motion on cylinders, Transient analysis
Step 11: Export the model to MotionSolve (WheelLoader.xml)
Simulation Steps
MotionSolve performs a static + dynamic analysis for 25 seconds.
Step 1: Bucket and Boom actuators move the Bucket down
Step 2: Drive motion moves the Loader forward to push and load the object
Step 3: Bucket and Boom actuators move the Bucket up
Step 4: Loader moves backward
Step 5: The steering Wheel turns 90 degrees while the loader moves to the truck
Step 6: The bucket actuator unloads the object into the Dump Truck
Step 7: Bucket and Boom return to the original position while Loader moves back from the truck

Post-Requisite
RESULTS
Upon completion of the co-simulation, we can generate animations to visualize the stress and deformations of Flexbodies. Additionally, we can extract data from (.plt, .abf, .mrf) files to facilitate comparison and gain deeper insights into the results.
Stresses on the Boom and Rockers (MPa)

Stress Hotspots (MPa)

Actuators Forces (N)


Actuator Displacements

Bucket Actuator Displacements

Boom Actuator Displacements
CONCLUSION
In this technical endeavor, we embarked on a comprehensive exploration of predictive dynamics within complex systems, leveraging a synergy of cutting-edge software solutions. By integrating multi-body equipment models from Altair MotionSolve™, OptiStruct™ for structural analysis, and hydraulic actuators from Altair Twin Activate™, we have realized a profound advancement in our ability to forecast and validate system behaviors under real-world operating conditions.
This integrated approach yielded several critical achievements. Firstly, it enabled us to validate system performance under real-world operating conditions, bolstering our confidence in design robustness and reliability. Furthermore, our methodology empowered us to identify and mitigate stress concentration areas within components, facilitating proactive design optimization and risk mitigation. The refined analysis of system loads provided valuable insights, aiding in the development of components capable of withstanding operational demands effectively.
In conclusion, the integration of multi-body equipment models, and hydraulic actuators through advanced simulation techniques has empowered us to push the boundaries of predictive engineering. The insights gleaned from this endeavor not only advance the state-of-the-art in system design and optimization but also lay the groundwork for future innovations in dynamic modeling and simulation. As we continue to refine and expand upon these methodologies, we move closer to realizing the vision of robust, resilient, and efficient systems across industries and applications.
Key Takeaways:
- Integration of diverse modeling techniques enhances predictive capabilities.
- Validation under realistic conditions instills confidence in system design.
- Forecasting stress concentrations enables proactive component optimization.
- Accurate loading analysis facilitates tailored design and operational parameters.
- Proper sizing of actuators optimizes energy efficiency and system performance.
- Continuous refinement and innovation drive progress in predictive engineering.
AUTHORS
Vishvam Naik, Solutions Engineer – Systems Integration
John Dagg, Systems Engineering Intern
Christopher Fadanelli, Solutions Engineer – Systems Integration
