The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
How can I move the human phantom model using EditFEKO (let's say the right arm)?
Hi Husam
Which phantom are you using?
Hello Husam,
The articulated phantom model consists of many files. You will see that there is a ReadMe.txt file that says:
This model is a homogeneous parametric model of the articulated human phantom. Each body part is imported by EDITFEKO and can be rotated to change the phantom's physical behaviour. The model consists of dielectric triangles. The mesh size will change with frequency and has been tested up to 900 MHz. Note that the average muscle, epsilon (#eps_r) and sigma (#sig) parameters should be changed for different frequencies. The parameters can be found at the FCC website: https://www.fcc.gov/general/body-tissue-dielectric-parameters. An antenna or any other structure can also be imported in this model by using the IN card in EDITFEKO. The main file is called, 'Articulated_Human.pre'
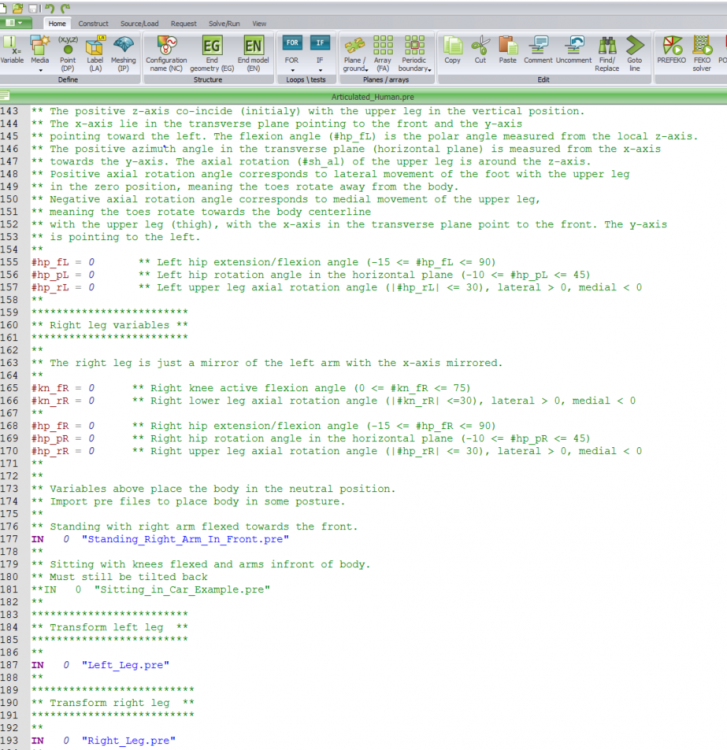
And there is a a Articulated_Human.pre file and it contains variables with comments to indicate how to control the movement. Below is an example extract.
... ********************* ** Neck variables ** ********************* ** ** The neck is orientated using a local co-ordinate system with the z-axis pointing towards ** the crown of the head and the x-axis pointing to the left side. The origin of the local ** system is in the middle of the neck (DP point NK). The flexion angle (#nk_f) is measured ** from the local z-axis and the rotation of the flexion axis (#nk_p) is measured from ** the positive x-axis. The axial rotation (#nk_a) of the head is around the local z-axis. ** The rotation of the flexion axis is used to tilt the head toward the side, generally only ** the axial and flexion angles are used.** #nk_f = 0 ** Neck flexion variable |#nk_f| <= 35; > 0, left flexion, < 0 left extension #nk_p = 0 ** Neck flexion axis rotation angle in the horizontal plane, 0 <= #nk_a <= 90; 0 left, 90 front #nk_a = 0 ** Neck axial rotation |#nk_a| <= 35, > 0 look left, < 0 look right ** ********************* ** Torso variables ** ********************* ** ** The torso is orientated similarly as the neck it is also linked to the hip/pelvis ** The torso is orientated using a local co-ordinate system with the z-axis pointing towards ** the crown of the head and the x-axis pointing to the left side. The origin of the local ** system is at the base of the torso (DP point TO). The flexion angle (#to_f) is measured ** from the local z-axis and the rotation of the flexion axis (#to_p) is measured from ** the positive x-axis. The axial rotation (#to_a) of the torso is around the local z-axis. ** The rotation of the flexion axis is used to tilt the torso toward the side, generally only ** the axial and flexion angles are used. The present construction limit the absolute axial ** rotation angle to less than 20 degree. Construction could be extended if needed. ** #to_f = 0 ** Torso flexion variable |#to_f| <= 20; > 0, left flexion, < 0 left extension #to_p = 0 ** Torso flexion axis rotation angle in the horizontal plane, 0 <= #to_p <= 90; 0 left, 90 front #to_a = 0 ** Torso axial rotation |#to_a| <= 20, > 0 look left, < 0 look right ** ************************* ** Left arm variables ** ************************* ** ...
The details in the comments should be enough for you to control the phantom's position. The rest of the process is the same as it would be for any EDIFEKO model (run PREFEKO, view in POSTFEKO until the model has been completed, then simulate the model and view the results).
I still do not see any movement. I read the files and more control parameters are given. For example, if I need to raise up the right hand, how can this be done??
Can you provide me with more illustrative answers please.
Thanks,
When you download the model articulated_human_SEP, in the folder you will find several .pre files, if you take a look at the Articulated_Human.pre, you will see that you can include different models with different positions, such as Sitting_in_car_Example.pre and Standing_Right_Arm_In_Front.pre (for example).
<?xml version="1.0" encoding="UTF-8"?>
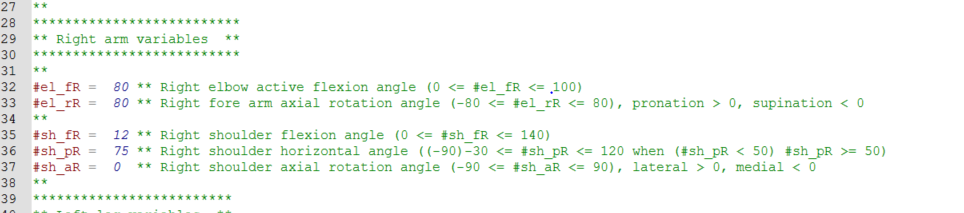
If you then go, for example, to the file Sitting_in_Car_Example.pre and modify the Right arm variables to the following
Then you obtain the movement in the right arm, so please modify the desired variables in the files Sitting_in_Car_Example.pre, so in the include files and not the main file Articulated_Human.pre.
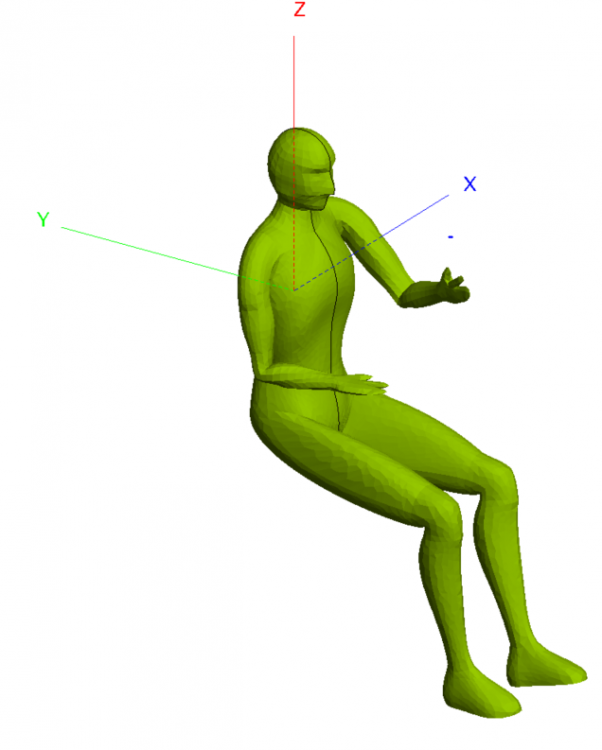
Here the result obtained with my modifications:
I hope this clarifies a little bit the use of these files.
Hi Husam,
The description pretty much says it all. More illustrative may be this video:
Unable to find an attachment - read this blog