Hi all,
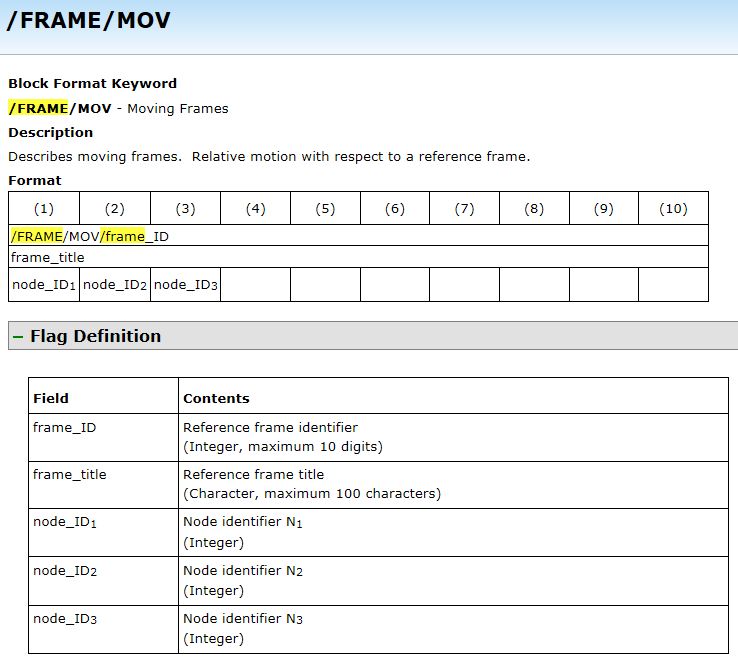
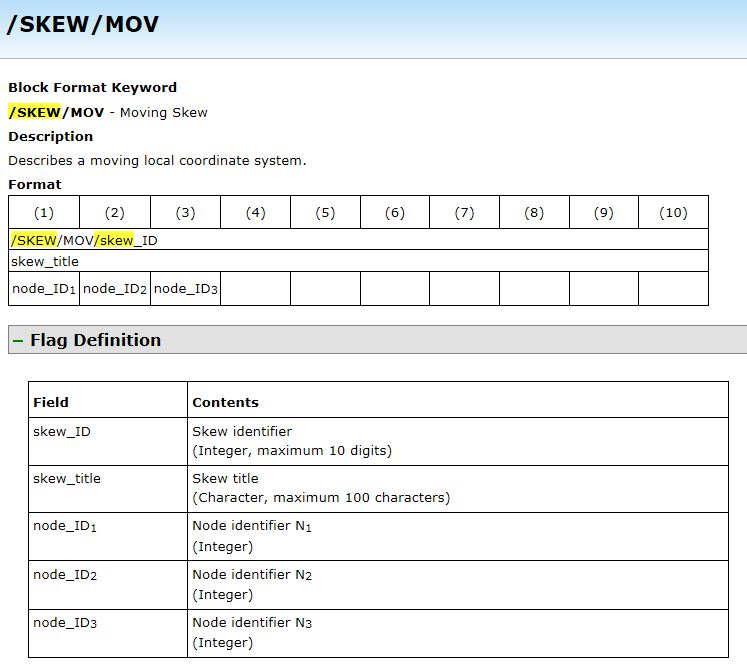
1. What's the difference between /frame/mov and /skew/mov? From the user manual, I don't find the difference. In my opinion, this two keywords are defining a local system by selecting three nodes.
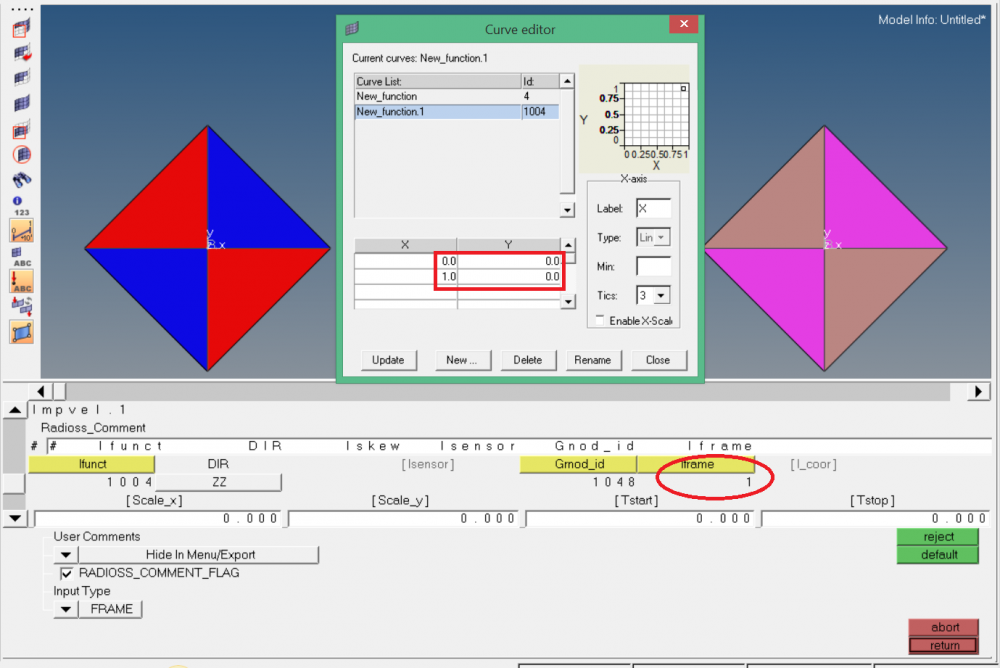
2. In keyword /impvel, it can select a skew or a frame. What's the difference? I cannot understand the comments in the manual about 6 and 7 figure below.
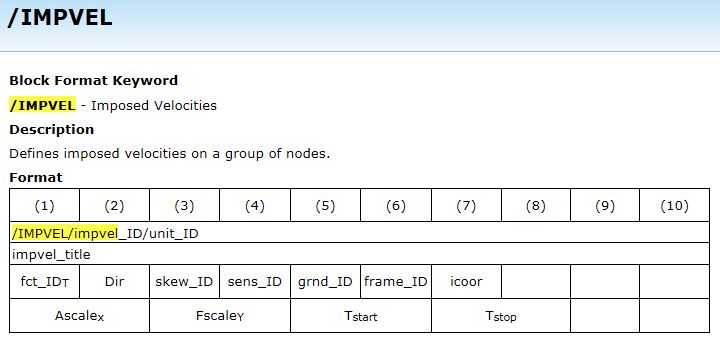

Anyone can explain the difference? Thank you
Roy