Hello everyone,
I found a realise of vehicle differential using Coupler entity in a dual axle transmission model by MotionView Assembly Wizard, it looks like below:
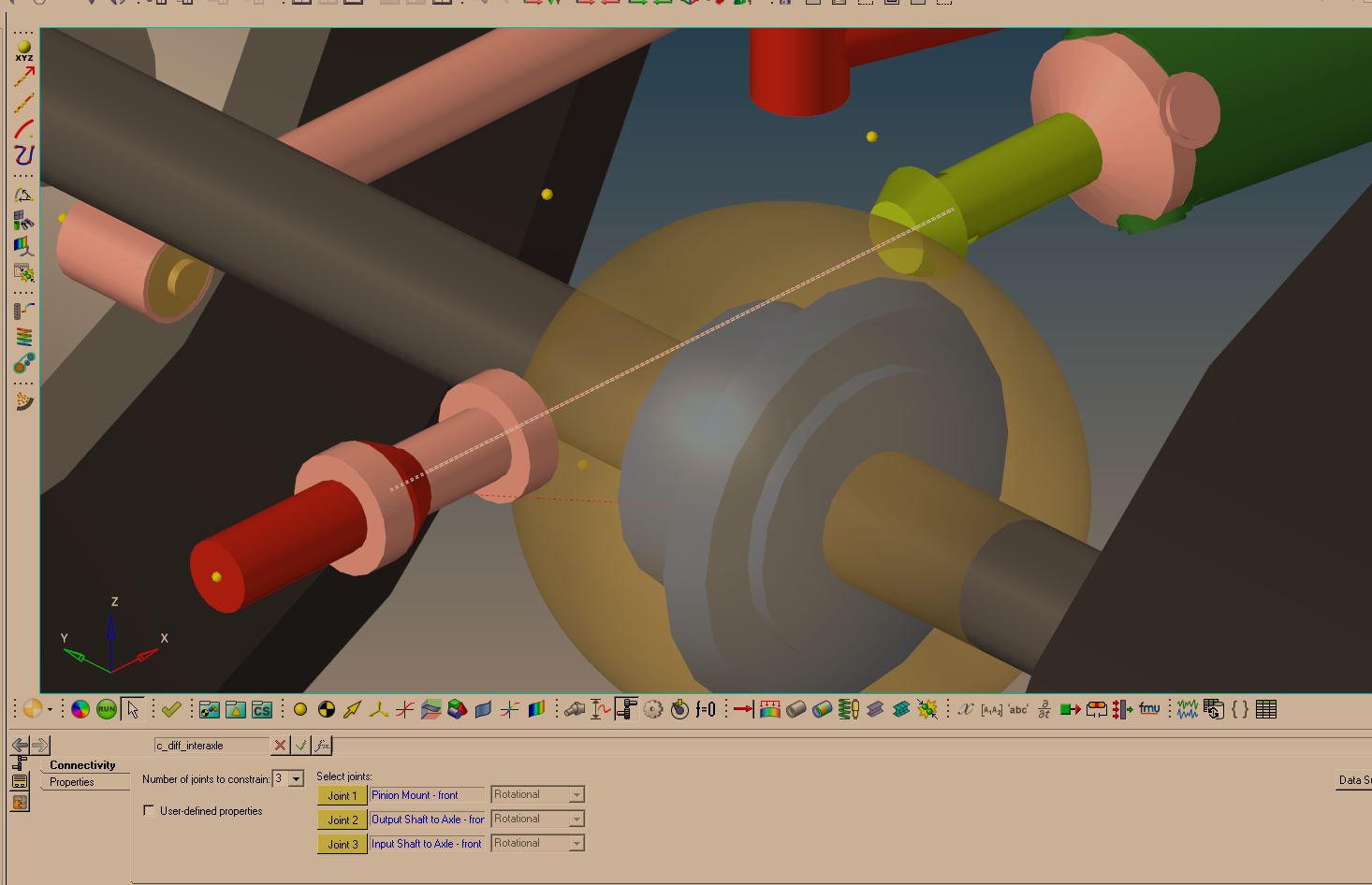

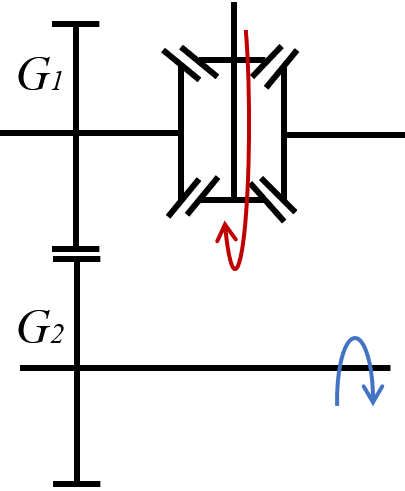
As to my understanding, it distributes power from the input shaft between the two drive axles. To make it works correctly, the load torque should be defined on differential's sun gear (joint3 in figure), and rotation speed should on planet gear(joint 1 and 2).
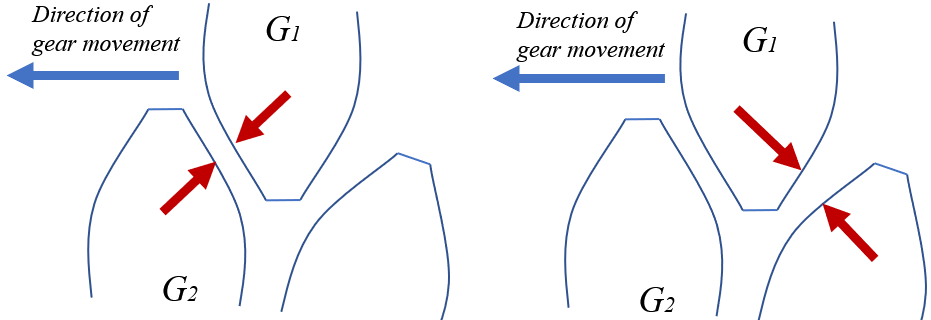
However, my own model contains gears, and i want to make sure they have a correct drive relationship. Like figure below, I want G1 always works as drive gear. It is important in a Contact defined gear pair, for the side of drive affects the sideface of teeth in contact.
If I use the Coupler differential, rotation speed is defined on G2 side. Will it forces G2 to be drive gear? How can I ensure the drive gear is the gear I want at this situation?
Sincere thanks,
Garand