Hi everyone
I am modeling a transmission system that includes gears. I plan to replace the gear meshing force with a pair of concentrated forces. Therefore, the application point of the forces is not on the axis of the gear.
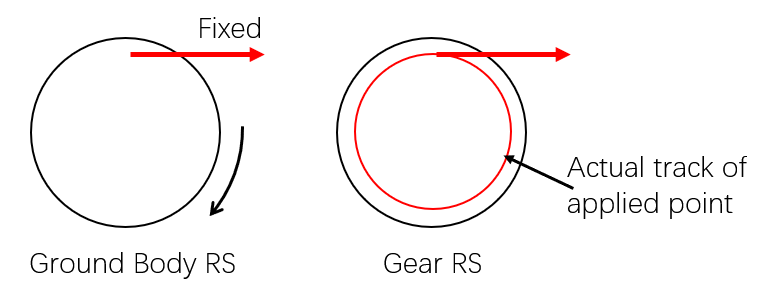
I need to ensure that the application point does not rotate with the axis, so the gear force stays at the righr place. However, once the "Action force on" option in the 'Force' is used to specify the Body, the application point rotates with the axis, leading to an incorrect result.
In fact, I tried translating the meshing force to gear center and applied torques to compensate for it. But after that, the forces is no longer collinear, creating an additional moment. I am not sure how to compensate for this moment, for the system’s shell is flexible, and adding a compensating moment would introduce deformations that should not exist.
I would like to know how to solve this problem. Thank you for your help,
Garand