The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
How can I set the rigid body settings in order to avoid the penetration into the rigid wall .
<?xml version="1.0" encoding="UTF-8"?>
Hi,
I am not sure if it is possible to make contact between a rigid body and rigid wall work due to incompatible kinematic conditions (see FAQ on this topic I have already shared with you).
As a workaround, instead of a rigid wall set up a meshed plane with a rigid body on it and a type 7 contact. Check the model attached:
Unable to find an attachment - read this blog
Hello, I could not see the model becasue I am using an ancient vertion of Hypermesh /emoticons/default_sad.png' srcset='/emoticons/sad@2x.png 2x' title=':(' width='20' /> could you share the model using radioss or using an ancient vertion of hypermesh, please.
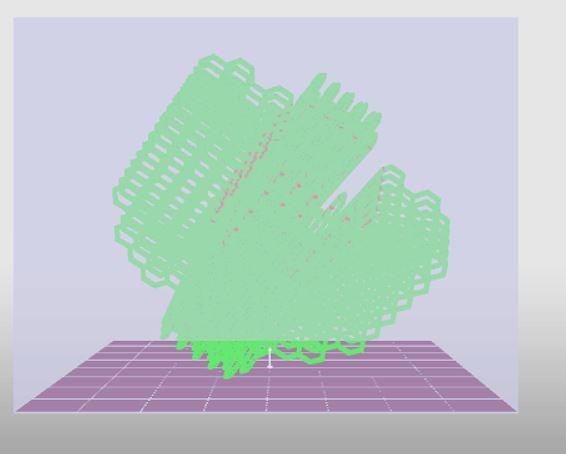
I followed your advice about setting a plane but now a have this problem
NEGATIVE VOLUME OF TETRA
In the model checker tab
What can I do?
Sorry about that, here you go:
NEGATIVE VOLUME OF TETRA error happens due to mesh quality. Can you share the model?
I´ve sent you the model.
I did not receive the model. Can you attach it here?
https://drive.google.com/open?id=1PbYI0ZzZndKmKo73Oq5hgLAcdw8_NrCH
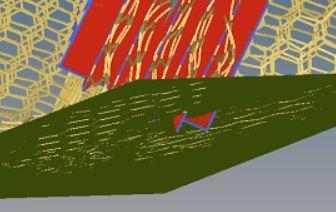
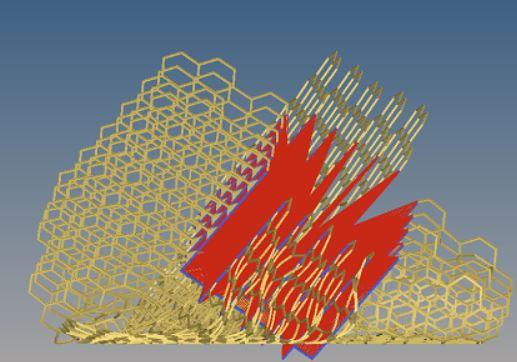
In the model you shared there is a problem of deep penetrations when the rigid body on impactor comes into contact with rigid body on flat plate (representing rigid wall). Due to penalty contact formulation this leads to high penalty forces and stiffness, and consequently to a drop in time step. In case CST mass scaling is used there is no timestep drop but mass increase leading to error termination. This is a known issue of rigid body impact on another rigid body or on fixed nodes or on very stiff structures:
thank you
Hello @Hyperman
Thank you for all the help.
I was trying to run this file
r
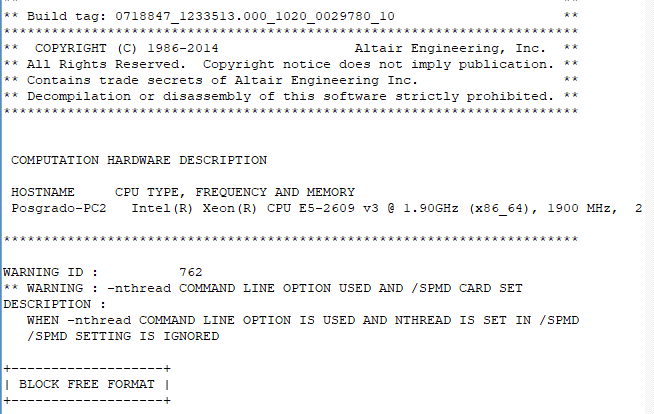
But it shows me some seconds after this message
this is the setting that I am using
Could you give me some advice, please?
Glad to help.
The warning 762 informs that /SPMD setting is overridden by -nthread or -nt command in Solver run Manager.
This can be ignored and the model should be able to run.
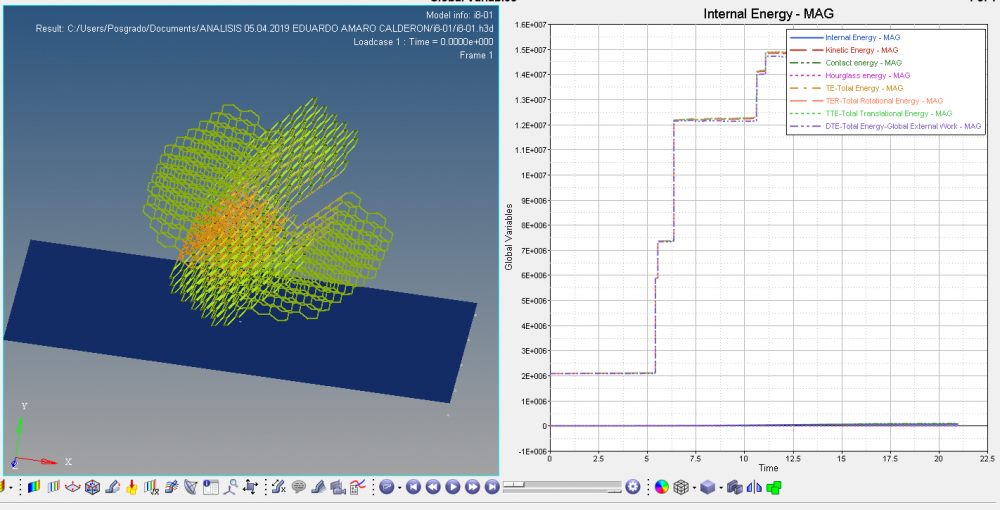
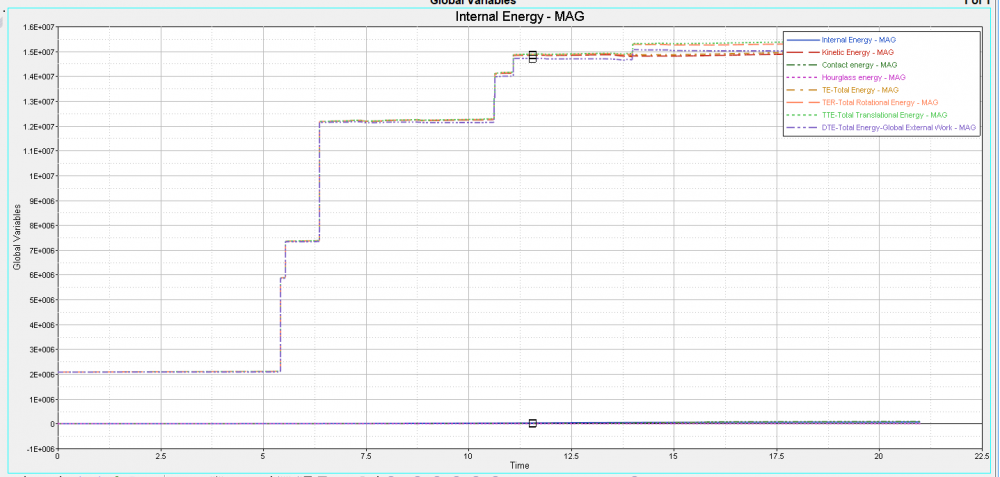
now I have this energy balance curves, I as understand when there are a lot of elements sliding and being crushed is normal to obtain high values of energy.
But is there a way to improve this energy balance?
I am using :
type 7 contact and 11
Upon second look into your model, I noticed you have added a mass of 2.518e+07 with M-ADV0 element. The unit system declared in the header card is g, mm, ms. This means you have 25+ tonnes impact being attenuated by a 2.8 gram structure " data-emoticon="" src="src" />/emoticons/default_laugh.png' title='' /> This is probably a mistake that is causing all the other problems.
jajajaja thanks a lot @Hyperman in the morning i realized that a contact type 7 was setting wrong, and also i have to check the units.
Thanks a lot.
/emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20' />
Thanks a lot, to all the hyperworks team.
Hello ftiends, i have new problems with a model , i have thisproblem, can yuo help me?