Long story and potentially many questions in the same post but all related to the same issue and I ned help! I can't seem to understand how my kjoint2 spherical connection between 2 RBODY is behaving. What I am trying to model is a suspension ball joint in Radioss and I want the rotation to be limited to a certain maximum angle in ANY direction from vertical (creating a conical shaped limit envelop). I created a simple problem to resolve my issues but it doesn't seem to work.
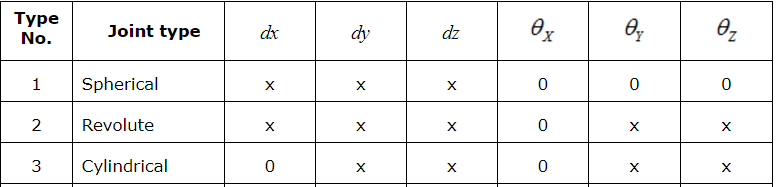
I cerated 2 node reference systems in such a way that they move together and that their Z axis is always coaxial. I then limited my kjoint2 in Saz- and Saz+ to ±1 rad but it does not behave as desired. When I plot my TH/spring, I can see that RZ of my spring DOES respect the 1 rad angle limit. But this does not make sense with the visual behavior and the true angle that I can plot in Hyperview that cleary goes over 1 rad. Also Rx and Ry are showing rotation which again does not make sence with the visual behavior.
Any help to resolve this is appreciated!
Thanks
All my simple model files:
<?xml version="1.0" encoding="UTF-8"?>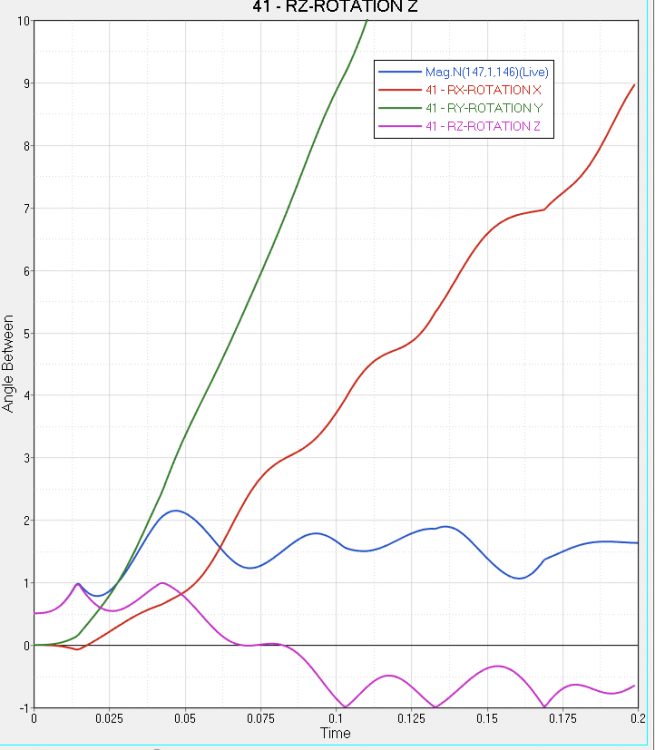
Unable to find an attachment - read this blog