Hi,
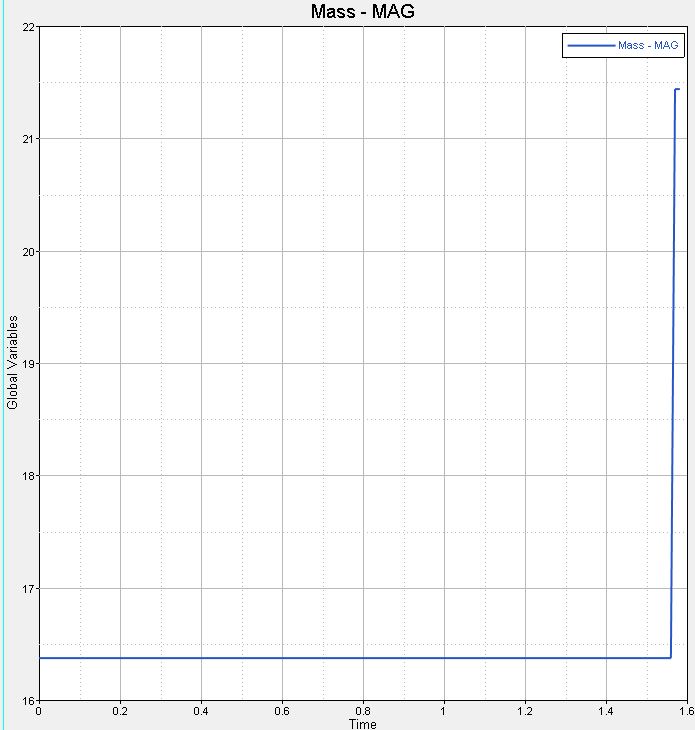
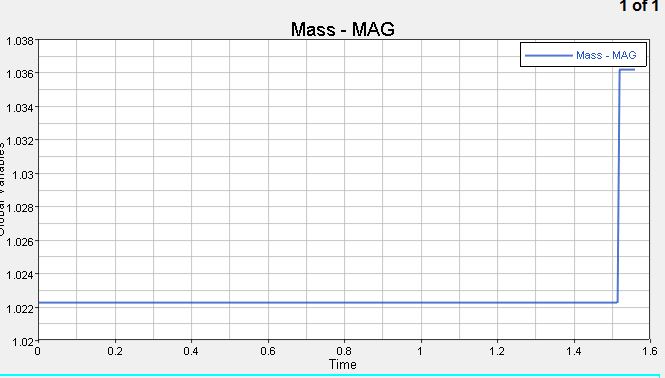
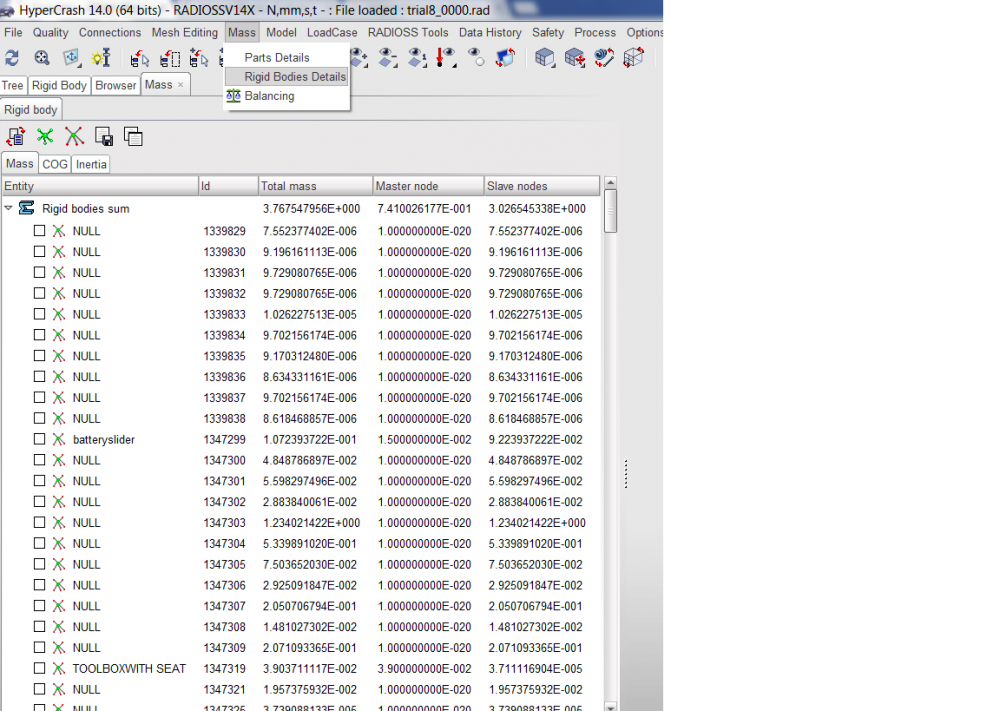
The mass of the system in my problem is increasing. I have used a global rigid body which is turned ON from 0 to 1.57 sec. After 1.57, it is turned OFF. At this junction i.e 1.57 I can see a sudden rise in the mass from 16.374 to 21.39 . I have used output block for part components if there is any mass addition in any of them but found no mass increase in all these components.I want to understand from where this mass increase is possibility as there is no error percentage in mass also. I have attached the image for mass increase.
<?xml version="1.0" encoding="UTF-8"?>