Hi,
I want to know if what I thought is correct.
The interface setting of two shells is as follows.
<?xml version="1.0" encoding="UTF-8"?>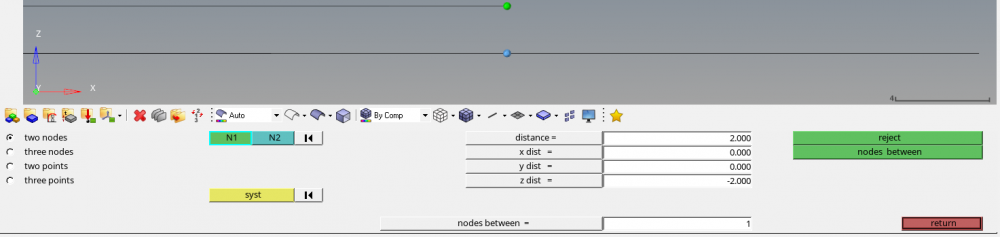
Top shell is 1T and bottom shell is 3T.
Distance between two shells is 2mm. -> No initial penetration
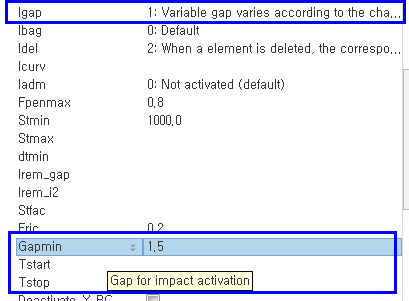
Igap determines how the size of the gap is calculated.
Igap = 1
<?xml version="1.0" encoding="UTF-8"?>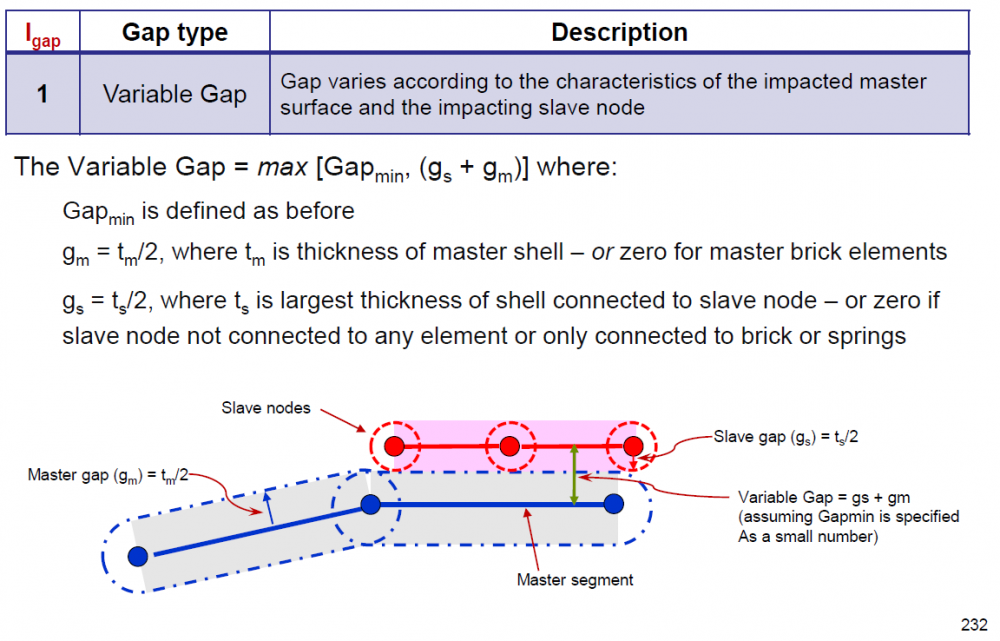
Then, in my model, Variable Gap = 2
And then my question is as follows.
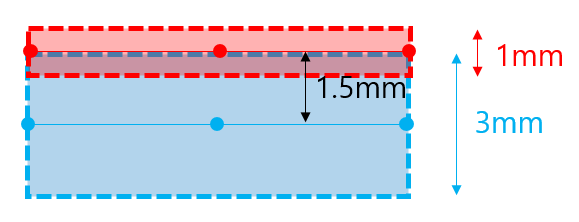
In this model, if Gapmin is 1.5 , contact force is applied when distance between two shells is 1.5 below figure??
(when 1.5 < distance between two shells, contact force is not applied??? )
Thanks