Hi,
I know this question is already asked multiple times but I still haven't fully understood it.
What is the exact difference when I define my stress constraint in the design variable of topology optimization or when I add it as a response and then a constraint of the optimization.
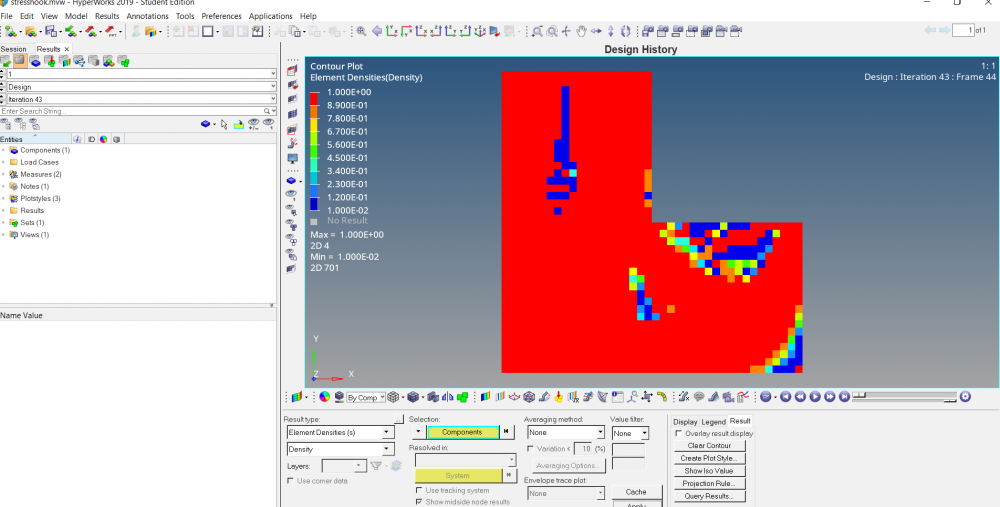
When I add it in the design variable, without any other constraint it doesn't do anything (see attachment).
Opposite to when I define it as a response and constraint. Then it does give results, although not very good ones.
When I apply them both on one design, it gives a different result then when I only apply one of them 2.
I do topology optimization of a hook with a minimum compliance and no other constraints or requirements.
thank you!
<?xml version="1.0" encoding="UTF-8"?>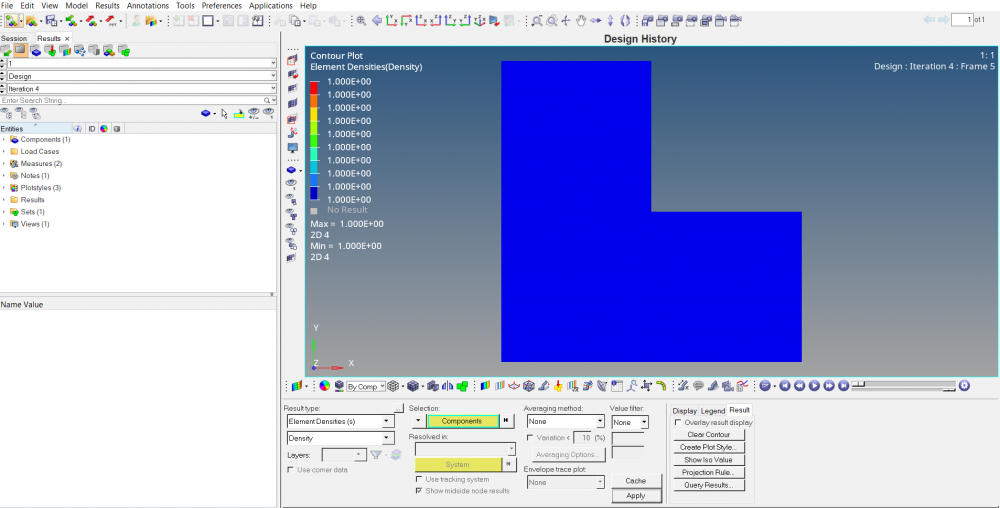
<?xml version="1.0" encoding="UTF-8"?>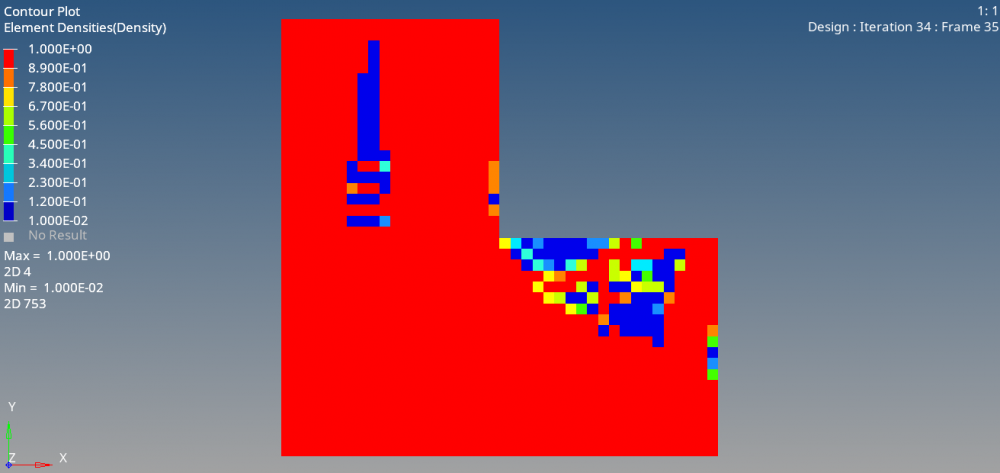
<?xml version="1.0" encoding="UTF-8"?>