The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
Hi,
I am trying to solve a brake problem in RADIOSS, where I couldn't bring down the positive energy error.
Please have a look at the out file attached and suggest me how to bring down the energy error.
Thank you in Advance
Unable to find an attachment - read this blog
Hi Karthic,
In your model the master node of rigid body is connected an element, RADIOSS by default moves the master node of the RBODY to the center of gravity of the RBODY. And this causes element deformation and adds non-physical energy to the simulation which causes the energy error. This could be one reason. The solution is to run HyperCrash model checker and accept the automatic fix which will create a new master node not attached to an element and make the old master node a slave. Else set Icog=3 which will make RADIOSS not to move the master node. Try this workaround.
Hi @George P Johnson
I even tried it without the master node of rigid body connected to element. But still there is positive energy error.
Please find the out files, the model is free from penetration and warnings.
Please check the interface id 1 in your model. The out file shows that this interface results in high energy error.
If issue persist please share the model file.
Hi George,
I have shared the model file, in which I have made few changes to the contact to overcome the interface high energy error.
But I couldn't reduce the energy error at the beginning of run.
I also tried running with out contact, found that the rotating disk is causing the initial energy error at the beginning and remains constant till the end of run
Please do correct me.
Thank you.
Hi @George P Johnson,
Thanks a lot for the support.
I sorted out the reason for energy error at the beginning of run.
I have a query, can I give rotational velocity about YY along with translation constrain in Y to the master node of the rigid body(ICOG = 3) ?
Yeah, I dont think it will create an incompatible kinematic condition issue.
Yes your are right, but it created energy error of 10 % at the beginning of run and the same remains till the end of run.
Once I remove the initial velocity from the master node of rigid, there seems Zero error.
Thank you George
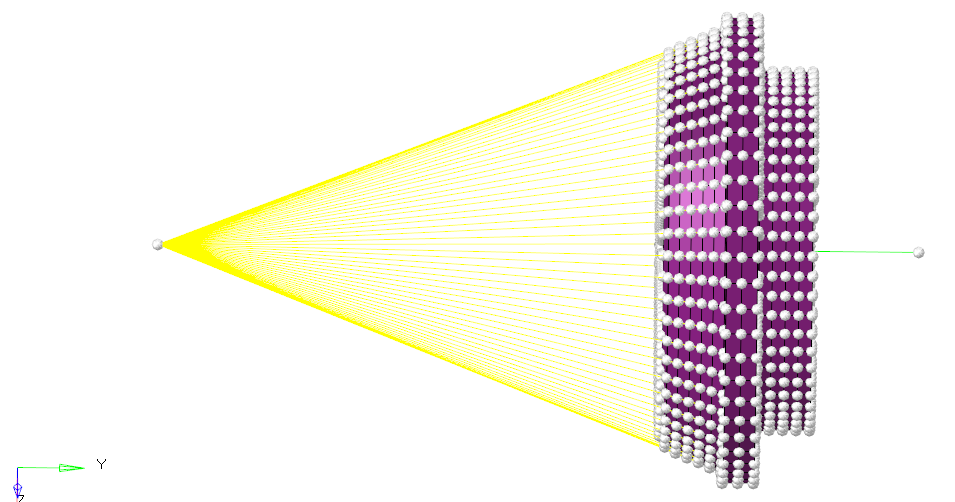
As shown in the image the rotating wheel has a mass at the master node of rigid (ICOG=3), which I have specified to the rigid body mass in card edit
1. When I give rotational velocity about YY to all the nodes as shown in image, energy error is 10 %
2. Rotational velocity about YY only to master node of rigid, energy error is 99 %
3. Rotational velocity about YY to all the nodes except master node of rigid, energy error is 0 %
Please let me know your comments and suggestions.
<?xml version="1.0" encoding="UTF-8"?>
Which type of element you are using solid or shell?
Since you have assigned mass to the rigid body select all nodes including the master node also. And it seems everything is fine even though a slightly higher positive energy is shown.
I'll try some workarounds/reviews in your model and will update you soon.
Thank you George.
What if I don't select the master node? Is mass concentrated on master node alone?
Hi Nachiket,
Its QEPH & HEPH with Physical stabilization
If the initial energy in the system is low, then it is possible to have large Energy Errors early in a simulation that reduce as energy is added to the system and in your case this seems to be happening. This is because, small numerical differences in the energy causes large percentage Energy Errors.
Remove the /DT/NODA/CST card, run the analysis and check the energy error. You can try with a low imposed time step value for this card.
Thank you George, As you suggested the energy error came down by reducing the imposed time step. But remained constant through out the run.