Hello Sir,
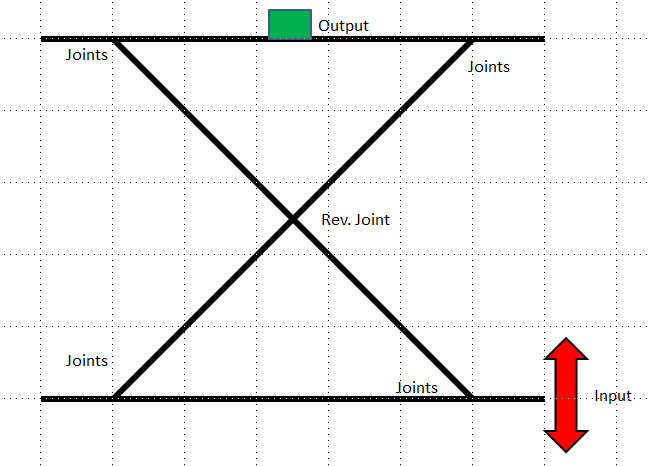
I am using motionview/motionsolve to simulate the scissor link mechanism as below image.
I have represented the revolute and transnational joint at the link end location.
Please share the preferable friction represent. I have used the default properties at the joint friction but I did not get any output force due to friction.
Please share your comments.
Thanks and Regards,
Yuvaraj S