Hello
I am working on contacts .where i have 2 bodies between contact is defined (PCONT MU0.3).
inner edge of biody 1 fixed and a rforce applied in the model.
During post processing, I have following queries
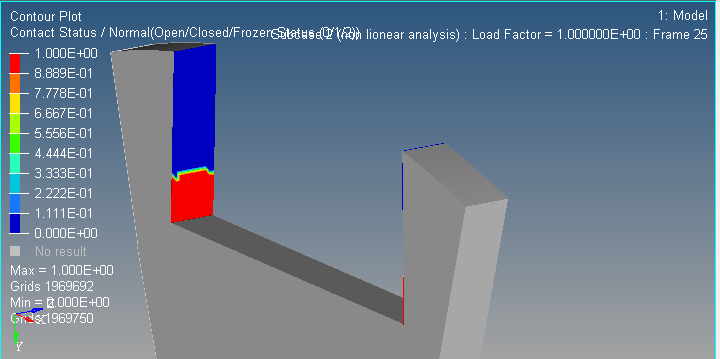
1. contact is happening only at a certain region (actually it should happen for the entair face .)
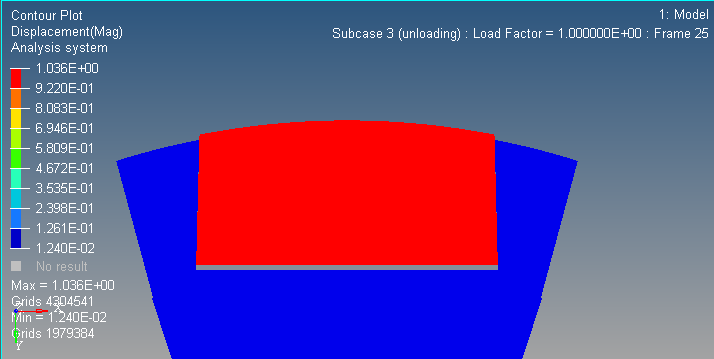
2.once the contact is formed and the body2 moved slightly ,then the contact should open but till the end the contacts once closed are remained closed. Why ?
3.contact force and contact pressure are high at the edge , Why ?
4.How to validate priperly if my contact is working properly (i can not depend on contact force and contact pressures as they are high at only the edge )
Plese find the attached pics
Please suggest me .
<?xml version="1.0" encoding="UTF-8"?>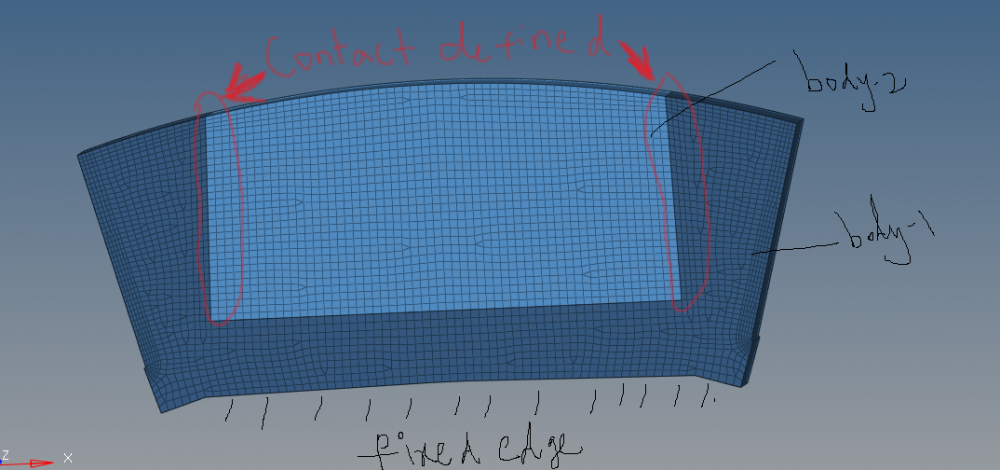
<?xml version="1.0" encoding="UTF-8"?>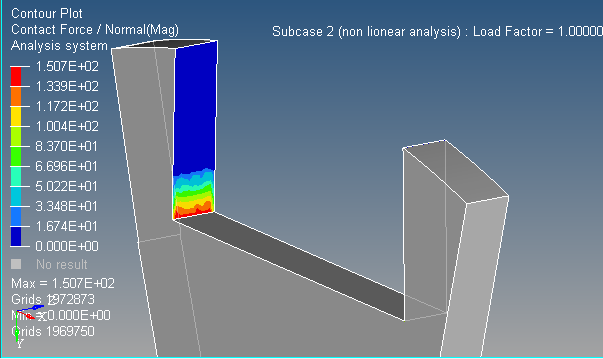
<?xml version="1.0" encoding="UTF-8"?>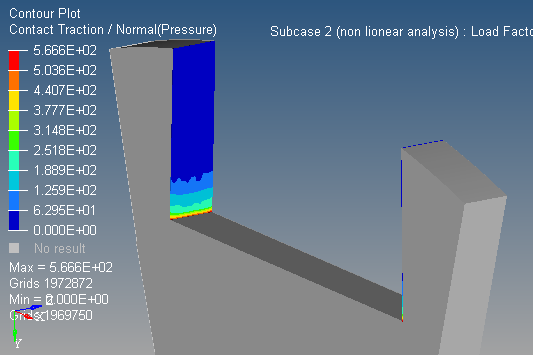
<?xml version="1.0" encoding="UTF-8"?>