Hello
I am using RADIOSS to simulate a crash test which I have previously done. The trajectory of the impactor before impact is complex and requires several linkages and mechanisms to set up.
The area of interest is the post-impact behaviour (stress/strain) on the target component, as well as the trajectory of the impactor.
When I run the impactor by itself, to see the launch trajectory, I get a reasonable run time of about an hour.
When I run the impactor with a simplified initial velocity + the target with all the contact and failure cards defined, I get a reasonable run of about 3 hours.
When I run the full model: impactor with the initial trajectory + the target with all the contact and failure cards defined, I get a run around 12 hours to reach the impact, and another 12-24 hours to get results from post impact trajectory.
I believe this is partly due the finer mesh required for the target model. I was hoping there is a way I can split the analysis in two, using the results from a the first as an initial condition for the second.
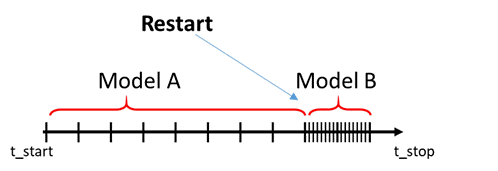
Consider the following scenario:
Model A: Simple model with only what is required to set off the trajectory of the impactor. The target is not modeled. Run from T=0 to T=T_impact.
The run is stopped at the moment where the impact would have occurred.
Model B: The target, with finer mesh and contact and fail definition is introduced, and the analysis is 'RESTART' picking up from where Model A left off.
In other words the target (with finer mesh) only appears just before impact onwards. This should theoretically cut down the majority of the analysis time. Is there a way to set up a RESTART file with introduction of new elements / properties / fail cards, and linking it to a 'Stopped' run?
I hope the diagrams attached illustrates what I'd like to do. Please let me know if there is a way to do this. Thank you.
Best Regards,
MN
<?xml version="1.0" encoding="UTF-8"?>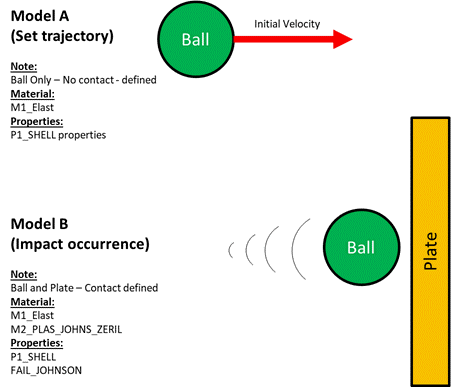
<?xml version="1.0" encoding="UTF-8"?>