Hi,
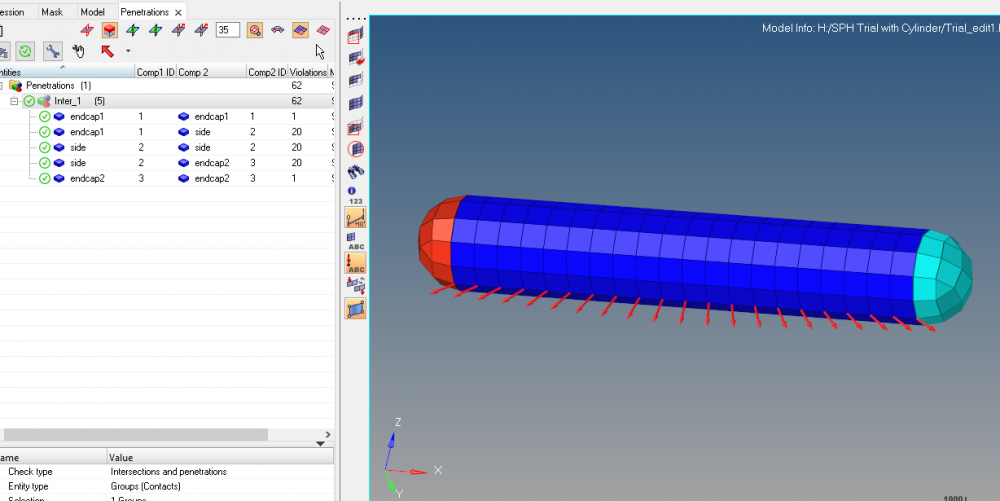
I am trying to simulate coal/grain being thrown around in a container due to an inertial force/acceleration/velocity. I have attached my files in this message. I am very new to RADIOSS and I am getting several errors. The model checker lists:
-RBODY on element
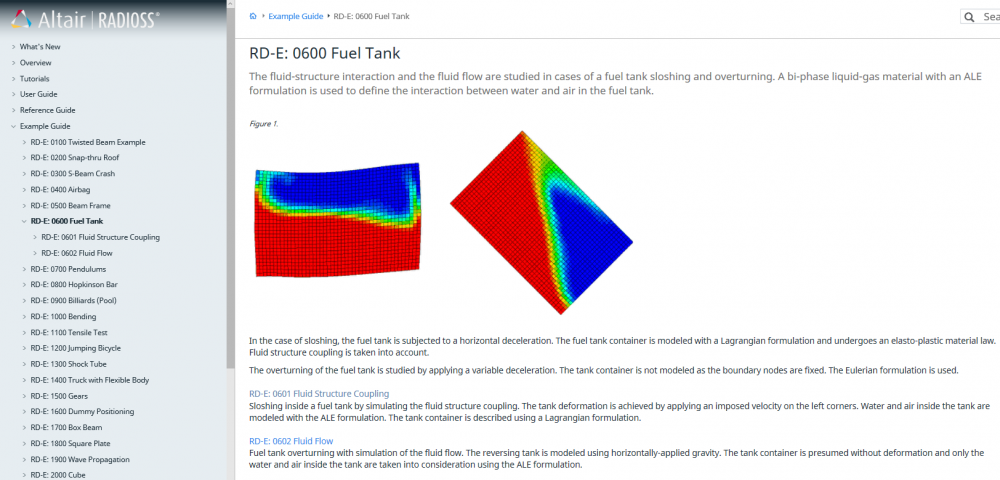
I am following the tutorial in the attached .pdf and created my rigid body and supports according to those instructions.
-Part/mat/prop incompatible
The coal/grain is modeled as SPH elements. I am using MAT LAW 10 to describe the coal. Checking the reference manual it seemed this was the best MATLAW to use, but I am unsure. If there is a better one please advise. Also, if possible, please advise how the card should be filled out.
-Incompatible kinematic conditions on nodes
I assume this is because I have done something wrong with my supports, as when I isolate , that's what it shows. I created an SPC again, according to the attached tutorial.
I realize that likely a lot of what I have done here may be nonsensical. I am on an academic server, so I do not have access to many of the necessary tutorial files, especially those to do with SPH, so if you are able to provide some sort of tutorial/guide to follow, it would be greatly appreciated.
Thanks in advance for the help.
When I run in RADIOSS:
************************************************************************
** **
** **
** RADIOSS STARTER 2017.2 **
** **
** Non-linear Finite Element Analysis Software **
** from Altair Engineering, Inc. **
** **
** **
** Windows 64 bits, Intel compiler **
** **
** **
** **
** Build tag: 0871760_123352017.2_1020_0048655_10 **
************************************************************************
** COPYRIGHT (C) 1986-2017 Altair Engineering, Inc. **
** All Rights Reserved. Copyright notice does not imply publication. **
** Contains trade secrets of Altair Engineering Inc. **
** Decompilation or disassembly of this software strictly prohibited. **
************************************************************************
.. BLOCK FREE FORMAT
.. STARTER RUNNING ON 1 THREAD
.. CONTROL VARIABLES
.. UNITS SYSTEM
.. MATERIALS
ERROR ID : 829
** ERROR IN DRUCKER-PRAGER MATERIAL LAW 10
DESCRIPTION :
-- MATERIAL ID : 2
-- MATERIAL TITLE : coal
TENSILE BULK MODULUS IS LOWER OR EQUAL TO 0.
.. NODES
.. PROPERTIES
.. 3D SHELL ELEMENTS
.. 3D TRIANGULAR SHELL ELEMENTS
.. SPH PARTICLES DEFINITION
.. SUBSETS
.. ELEMENT GROUPS
.. PART GROUPS
.. SURFACES
.. NODE GROUP
.. BOUNDARY CONDITIONS
.. INITIAL VELOCITIES
.. DOMAIN DECOMPOSITION
.. ELEMENT GROUPS
.. INTERFACES
.. INTERFACE BUFFER INITIALIZATION
.. RIGID BODIES
.. RETURNS TO DOMAIN DECOMPOSITION FOR OPTIMIZATION
.. DOMAIN DECOMPOSITION
.. ELEMENT GROUPS
.. INTERFACES
.. INTERFACE BUFFER INITIALIZATION
WARNING ID : 343
** WARNING : INITIAL PENETRATIONS IN INTERFACE
.. RIGID BODIES
.. ELEMENT BUFFER INITIALIZATION
WARNING ID : 312
** INCOMPATIBLE KINEMATIC CONDITIONS IN MODEL
DESCRIPTION :
6 INCOMPATIBLE KINEMATIC CONDITIONS IN MODEL
.. GEOMETRY PLOT FILE
.. ERROR ==> NO RESTART FILE
ERROR TERMINATION
------------------
1 ERROR(S)
22 WARNING(S)
PLEASE CHECK LISTING FILE FOR FURTHER DETAILS
==== End of solver screen output ====
==== Job completed ====
(Directory info here)
Job load: 1
Restart file SPH Trial_0000_0001.rst was not created.
Missing 'NORMAL TERMINATION' in output file SPH Trial_0000.out.
'ERROR TERMINATION' in output file SPH Trial_0000.out.
radioss:: Solver run finished after 22 seconds.
Unable to find an attachment - read this blog