Hello Everyone,
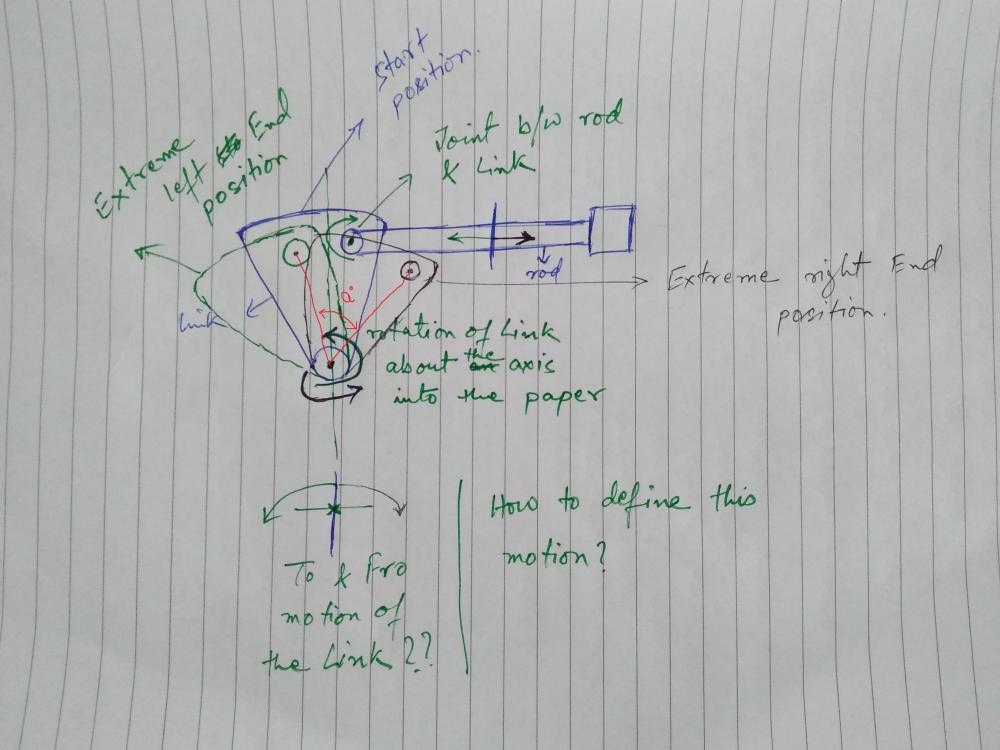
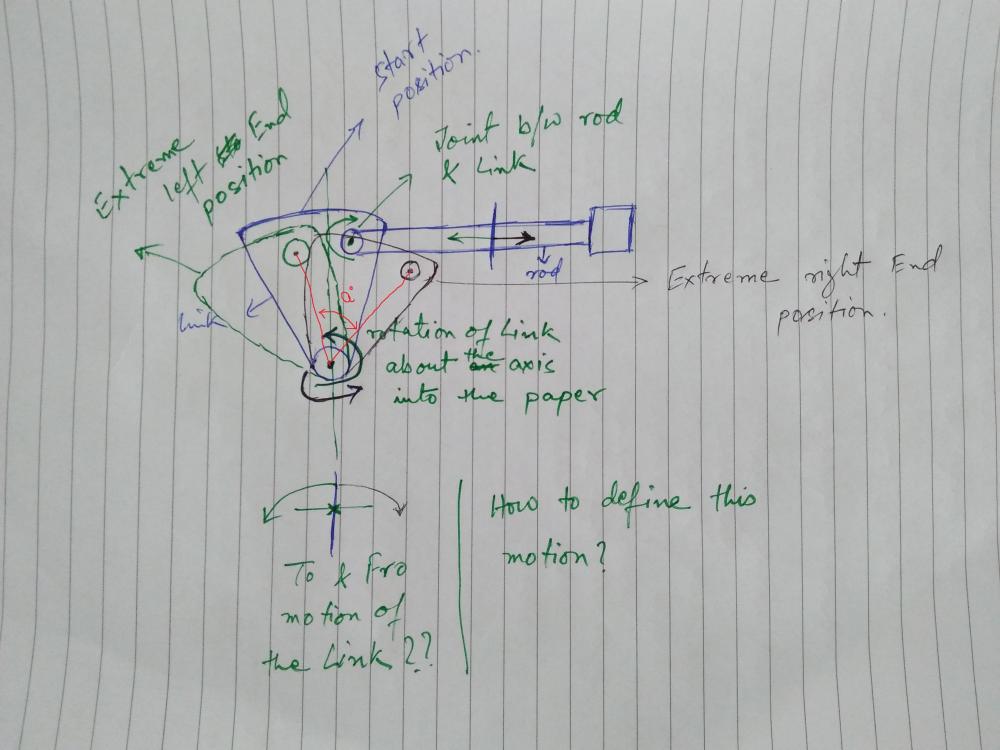
I am trying to make a MBS model of a system. I need to give the to and fro motion of the link (Please refer the attached picture) as input to my model. For example for the first 0.1 second, the link rotates in anti-clockwise direction about the axis of rotation into the paper and reaches the extreme left end position (from Start position). For the rest 1.9 seconds the link starts rotating in the clockwise direction about the axis of rotation into the paper and reaches the extreme right end position, which is 'a' degrees wrt the extreme left end position.
As far I understand this should be not very difficult, but somehow I was not able to acheive the same. I tried to use control points for the motion definition through curves, but since I am new to this software, was not able to acheive the same. So, if someone can help me with an example to build the motion through expression or curves, it would be great.
Thanks for your help in advance!
Warm regards,
Uday
<?xml version="1.0" encoding="UTF-8"?>