Hi all,
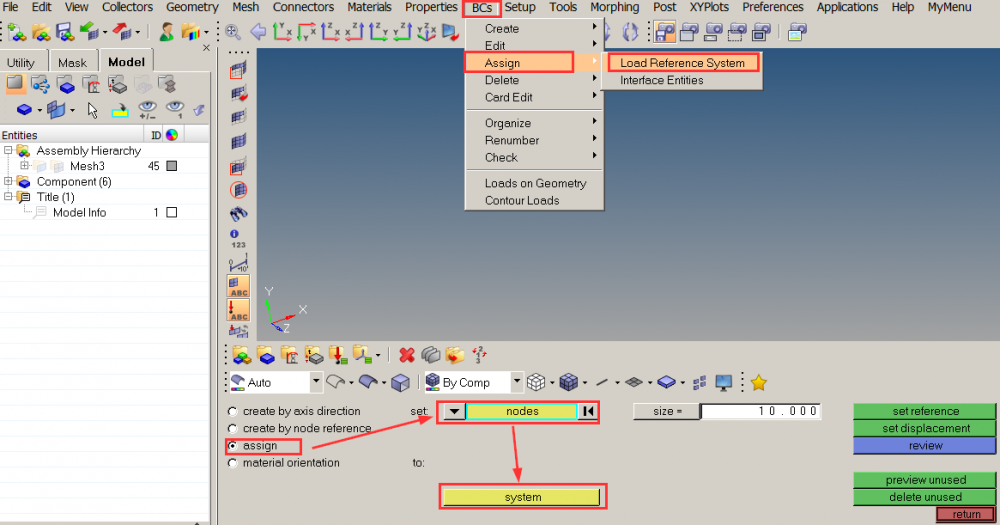
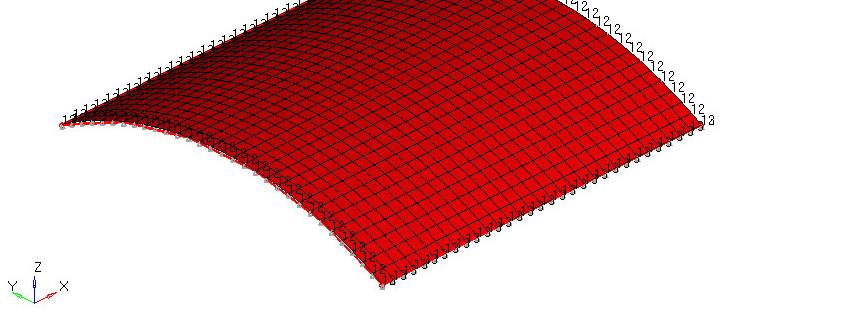
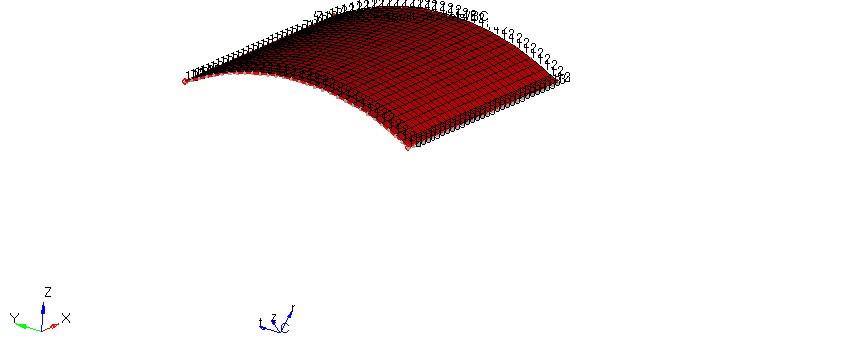
How can I define boundary conditions to a node in the local element coordinate system? I have a shell structure (see below) and do not want my BC's in XYZ, but in local u,v,w coordinates.
<?xml version="1.0" encoding="UTF-8"?>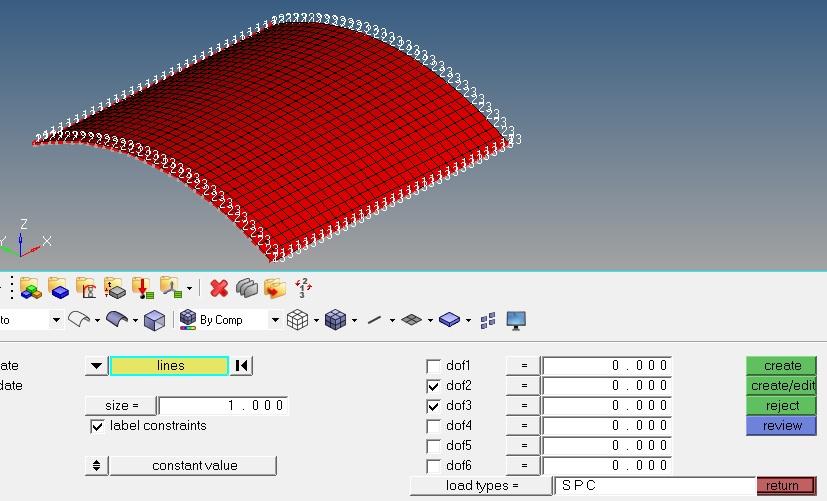
Later, I would love to post-process my results in a coordinate system related to each element as well.
Thanks,
T