Hello!
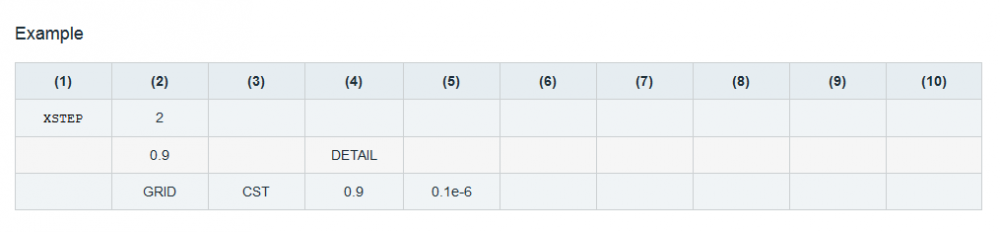
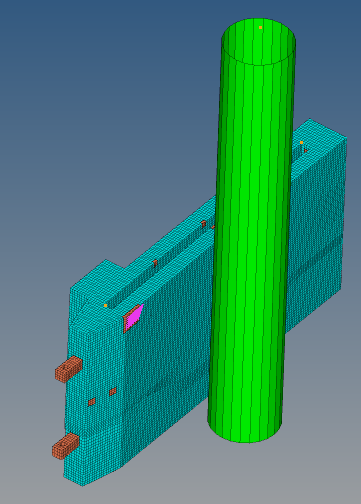
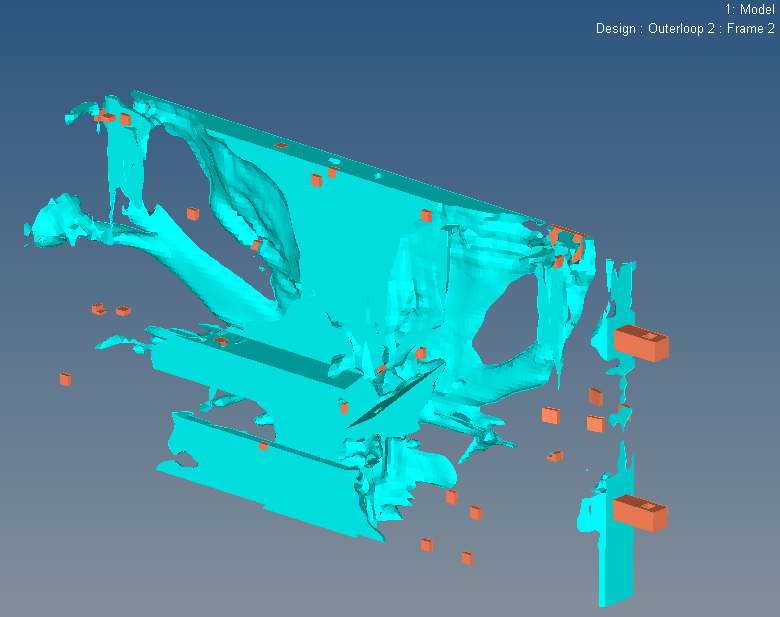
I am trying to do Free Shape Optimization of Large Displacement Non-linear Mooney/ODGEN material using EXPDYN and ultimately ELSM for equaivalent static load method as shown using OPTISTRUCT solver. I have setup model for EXPDYN using MAT1 and MATX42 with XSTEP in Sec with TA0=0.0 and DTA = 0.005 and TTERM = 0.05. I have contact surface defines by FRICTION with nu = 0 & 0.3(case-2). But i am getting error of INITIAL PENETRATION. I have seen earlier answers and removed penetration but still error is there. I have tried with TIE contacts as well.(.OUT and .rad file attached), but it is running for hours and no output is generated till. I want to know where i have made wrong. and If you could tell me how ELSM in OPTISTRUCT works?
Could anyone please help me?
Thanks in advanse...!
Unable to find an attachment - read this blog