Dear all,
I searched in the forum for similar questions but found nothing that could help me solving my following problem:
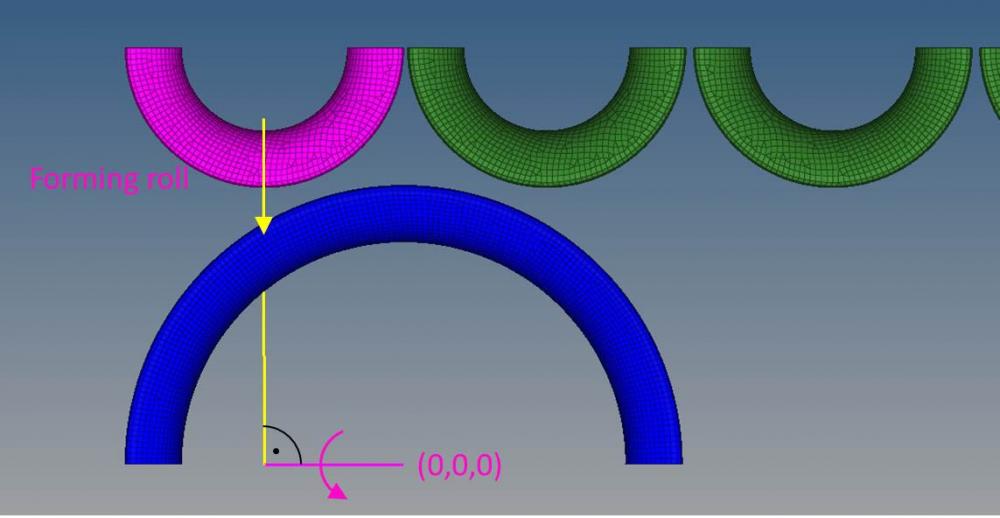
I have built a tube forming simulation (not Hyperform) using a roll-bending process. All of the tools are stationary accept the so called forming roll. The forming roll has 2 dof: the bending-arm angle and the displacement (radial to the rotational center of the bending-arm). To define the movement of the forming roll I have chosen a cylindrical coordinate system. Since the loadcollectors do not change their coordinate definition when using cylindrical Systems, I do not know how to correctly define the coordinate directions.
I have defined the following:
- beding arm-angle is the rotation around ZZ axis of the cylindrical system (which is working as I want it to)
- the displacement of the forming roll has to be done in radial direction but parallel to the fixed cylindrical System with a distance of X (this is not working, i tried several definitions but the forming roll is never moving towards the tube)
The best way to solve this problem would be to define two coordinate systems: the first one is fixed and the second one is local (moving) and parallel to the first one with a distance of X (in global X direction). The center of the second system has to rotate around the center of the first system. The displacement of the forming roll has to be done in Y direct of the local moving second system. Could somebody help me defining this? Therefore I attached the *.rad files of my model.
Thank you very much and best regards
Kerschten
Unable to find an attachment - read this blog