Hello everyone,
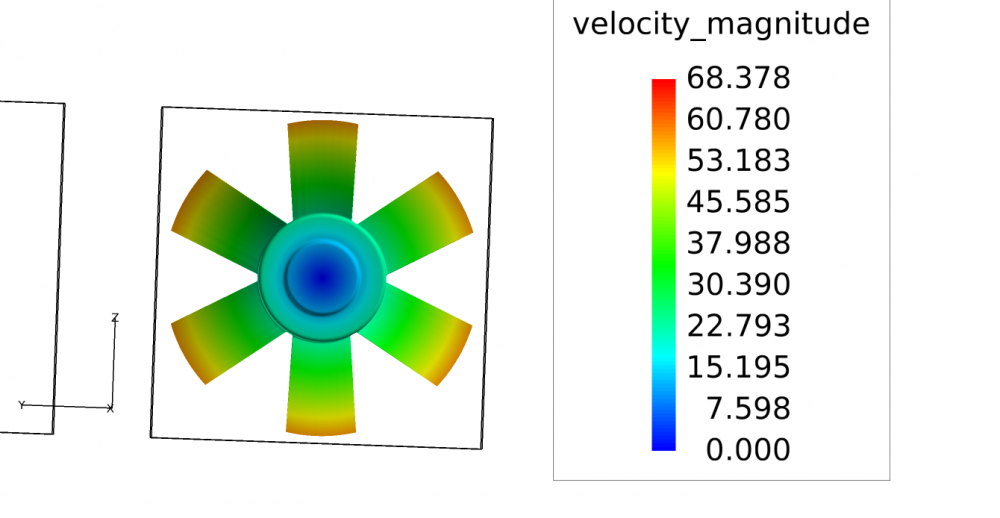
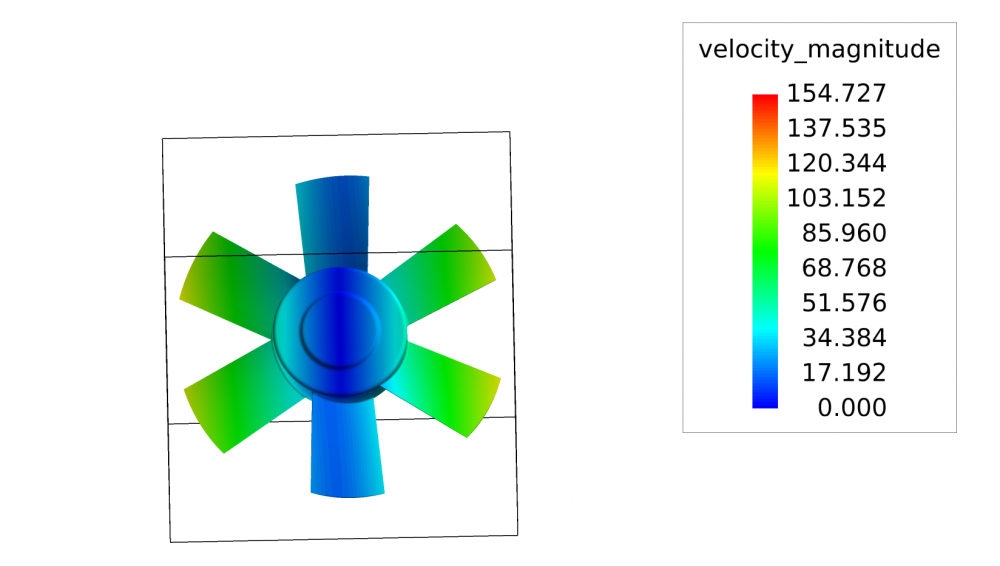
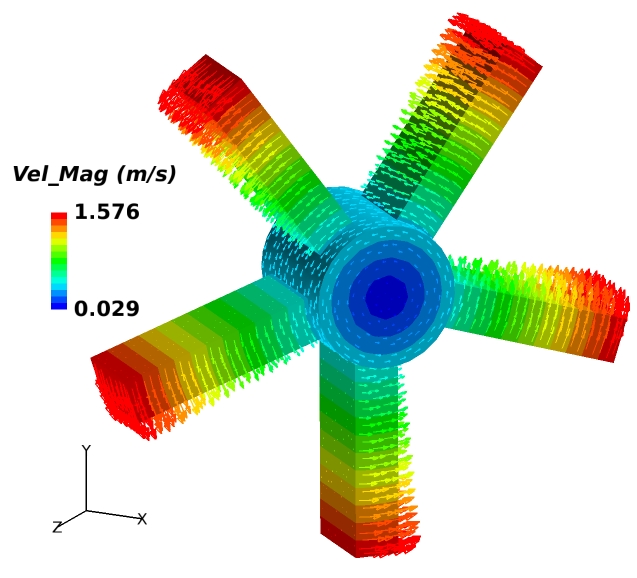
I am trying to simulate axial fans located behind the radiator of a semi truck in AcuConsole. I have three sets of fans in which one set has its axis similar to global coordinate system whereas the other two sets of fans have their rotation axis inclined to the global coordinate axis. I have tried to run the simulation but I have been experiencing divergence issues. I figured out the reason for this and it appears to be with the axis of rotation of the inclined set of fans.
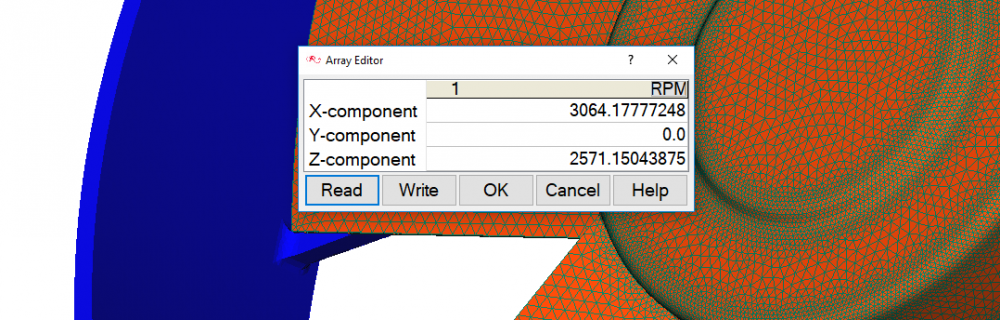
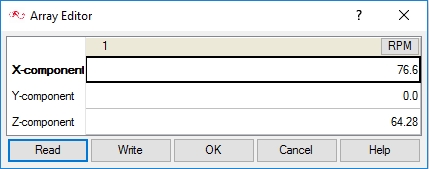
Till now, I have been creating a reference frame where i specify the rotation center as the center of rotation for the fan and then specify the RPM using the angular velocity option along one component (X, Y or Z). This I think is wrong. Could somebody help me out with specifying the correct axis of rotation for the inclined set of fans?
Should I specify different X, Y & Z components in the angular velocity section of the reference frame for the fans or should I change the 'Wall Velocity type' to 'Cylindrical' in the 'surfaces' tab, specify the cylindrical axis in AcuConsole? In that case, I was wondering if I should keep the Radial. Axial & Tangential velocity sections to 0.0 m/sec or give them a value?
I have attached some screenshots which may help for reference.
Thanks,
Yatish.
<?xml version="1.0" encoding="UTF-8"?>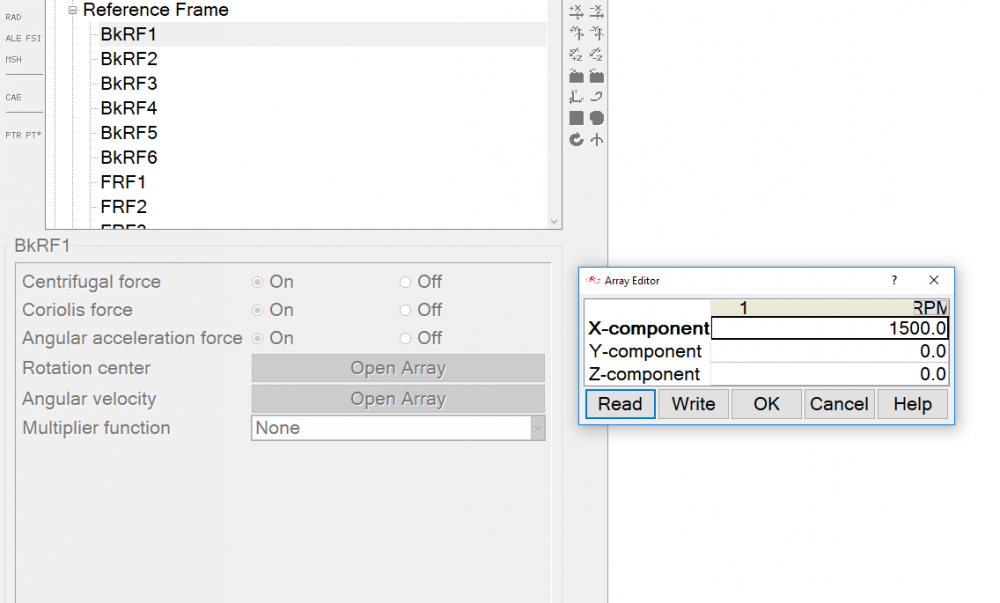
<?xml version="1.0" encoding="UTF-8"?>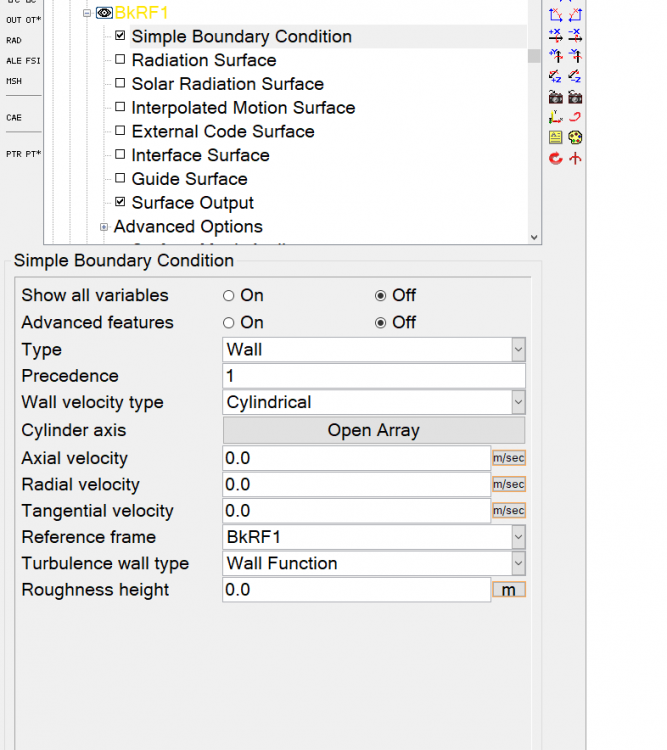
<?xml version="1.0" encoding="UTF-8"?>