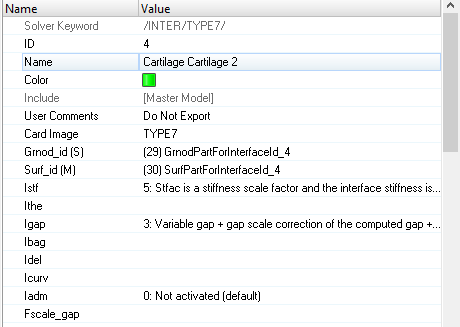
I have a model of a tigh bone and the hip, three concentrated loads are in the model to press the tigh bone into the hip. We use contact type 7 or 24 between the hip (blue) and the cartilage of the femur (orange), and contact 2 between the tigh bone (yellow) and the cartilage (orange).
That's how my model looks like:

If you hide the hip bone:

But as soon as the concentrated load comes into play, it looks like this:

The problem shows up with both, contact type 24 and 7. I've played around with several contact parameters but haven't found a solution yet. Does anyone have an idea what the problem could be?
Unable to find an attachment - read this blog