Dear all,
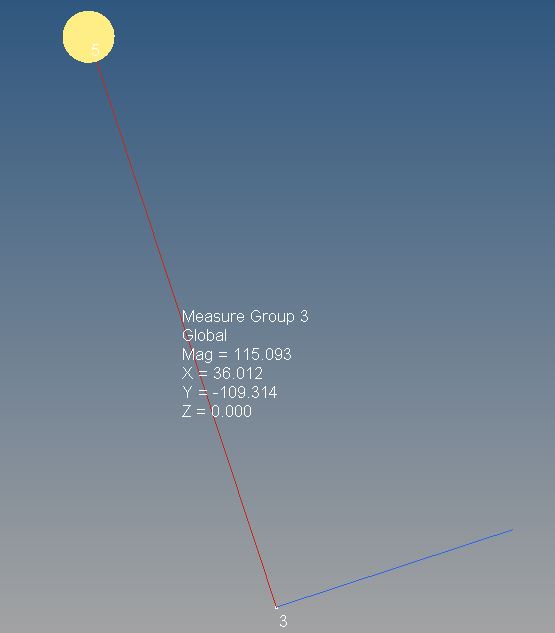
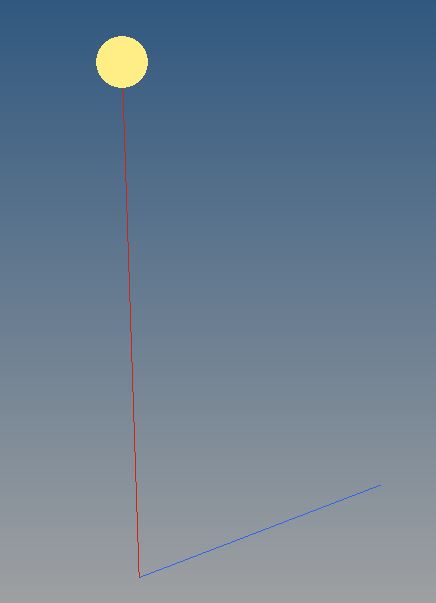
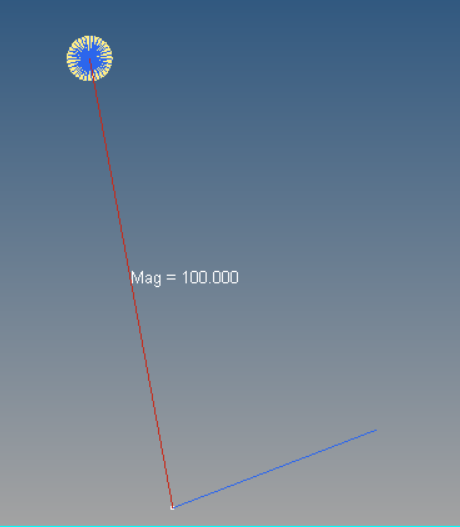
I have a problem defining the right connection between a rigid and a spring (please find a picture attached).
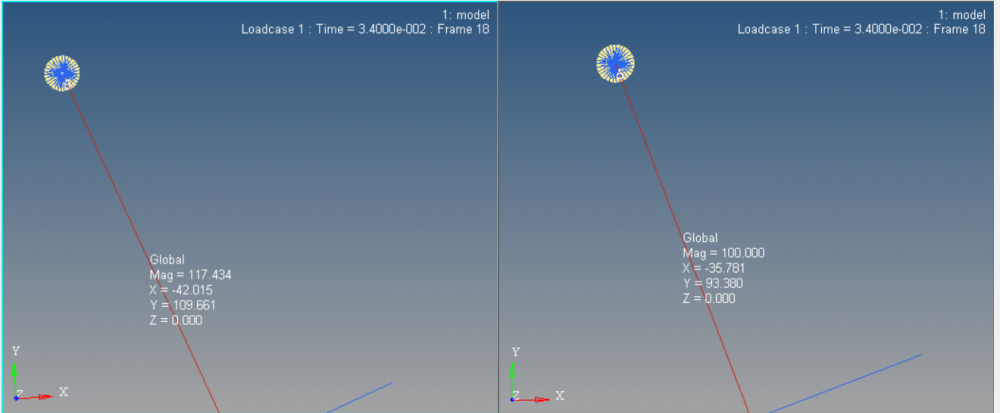
I want to design a simultaneous movement of a Part by rotation around global zero and translation along a spring (translational KJOINT).
My Problem is how to connect SPRING2N and RBODY to ensure no relative movement in the connection point.
Also attached is a test-model of the problem.
Thanks so much!
Best regards
Kerschten
<?xml version="1.0" encoding="UTF-8"?>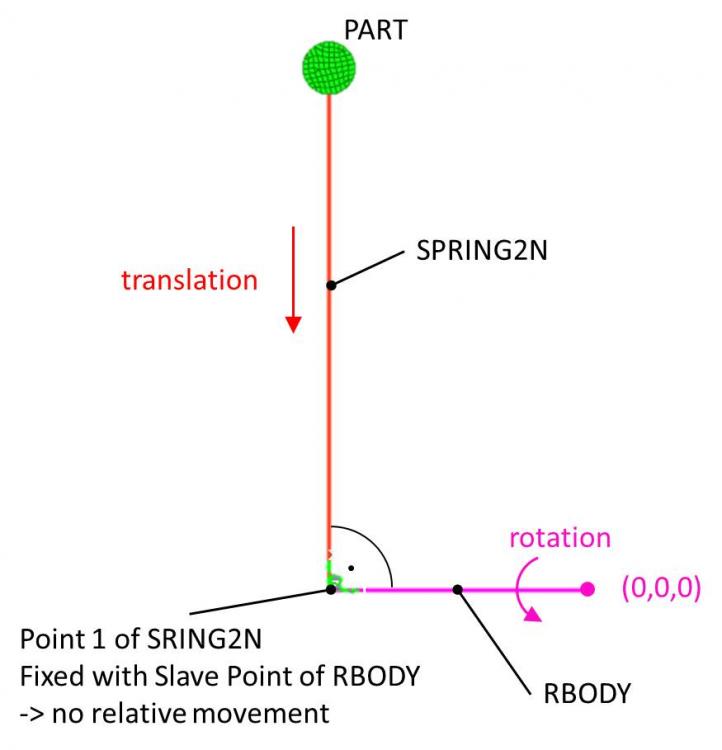
Unable to find an attachment - read this blog