Hi all,
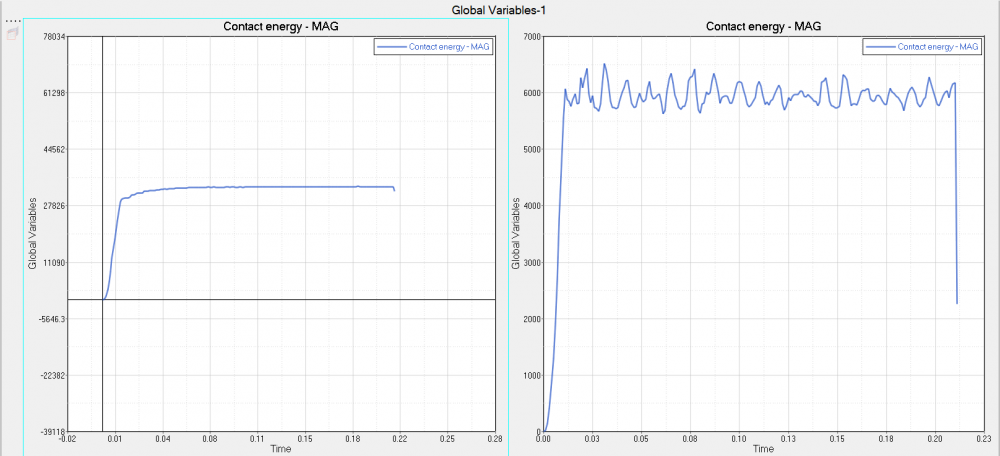
I'm working on a quasi static simulation of a FUP device for my thesis, however I keep having problems getting the contact energy/total energy in check. I've located the problem to the contact group and have been experimenting with it but, without real succes. I've been wondering if the possibility exists that I need a better defined material to get acceptable simulation results.
Included are my model file, rad file and T01 file.
Unable to find an attachment - read this blog