Hi,
I give the radius value in the corners, and the component direction separately as shapes.
I will use these shapes as DOE in Hyperstudy.
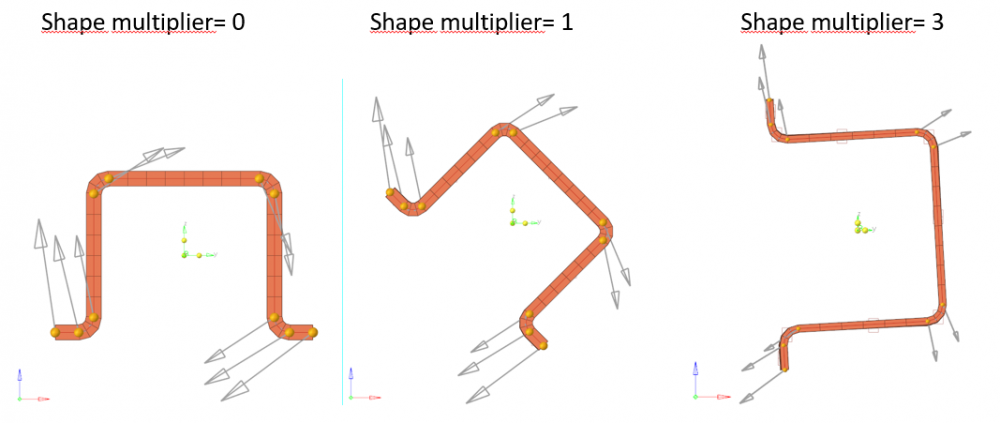
But when I change the two shapes at the same time, a useless shape like the one in figure 'radiusandrotatecombined' appears.
How can I design a proper shape by correcting this situation?
Thank you,
<?xml version="1.0" encoding="UTF-8"?>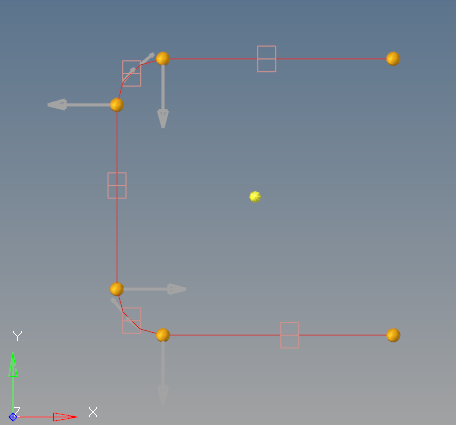
<?xml version="1.0" encoding="UTF-8"?>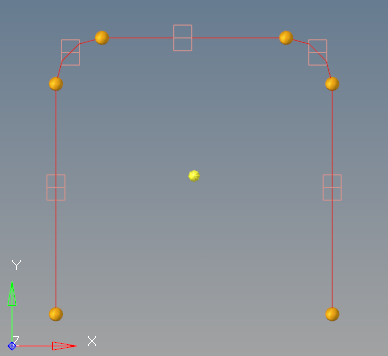
<?xml version="1.0" encoding="UTF-8"?>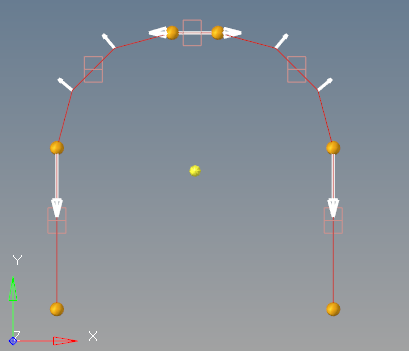
<?xml version="1.0" encoding="UTF-8"?>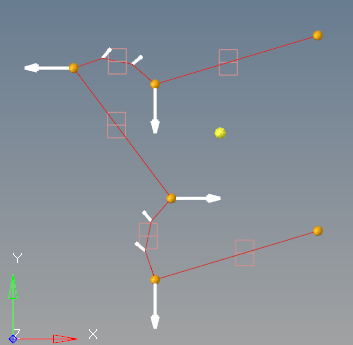
Unable to find an attachment - read this blog