Hi guys.
Is there anyone who can take a look at my model and tell me what's wrong with it? The model consists of two bodies, one disc and one T-shaped arm, connected with a PTCV joint. The disc is connected to ground body with a revolute joint. There is also a rotational force, acting on the disc in positive Z-direction. T-arm is connected to the ground body with translational joint and with a spring. When I run the simulation I get the error shown in Pic2 below. What is wrong with my curve? Why can't it be vertical? Even when I slightly increase x-coordinate for every point I get the error shown in Pic3. Is it maybe possible that the curve must have shape of a closed loop?
In this case the PTCV joint is suppose to act as a pin-slider/rotational-prismatic joint. I want my pin, fixed on the disc, to rotatate freely while sliding in the slot's Y-direction. The pin should only take up force i X-direction. Is there maybe easier way to create such joint?
As the output of this simulation I would like to know how big is the reaction force in the pin. How can I define such output in MotionView? Would it be correct if I choose force, then disc as a body and the marker at pin? Or do I have to make a user defined output?
I've attached my model file below. Thank you for your time
//EZY
<?xml version="1.0" encoding="UTF-8"?>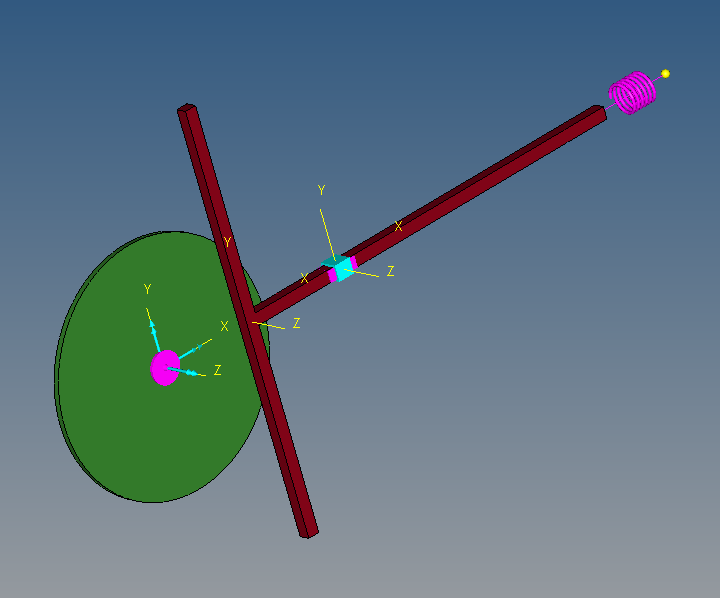
<?xml version="1.0" encoding="UTF-8"?>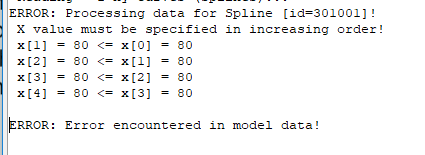
<?xml version="1.0" encoding="UTF-8"?>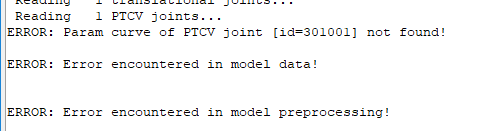
Unable to find an attachment - read this blog
