I'm trying to execute a power balance over a full electric period of a 4 pole motor (180 mechanical degrees) but I get an error :
evaluateInstances : Execution failed. Failed execution Failed to create a new instance of Power Balance.
BP_ERES => Wrong parameter BP_ERES => failed... BP_FNUM => Evaluation interrupted BAFOC2_1 => Evaluation failed BAFOC2 => Evaluation failed BAFOCC => Evaluation aborted evaluateInstances => failed stdcom.error.SoftwareFortranException: evaluateInstances : Execution failed. Failed execution at cad.core.common.error.ErrorManager.createFortranException(ErrorManager.java:153) at cad.flux.kernel.dbmanager.FGCProjectDbWrapper.evaluateInstances(Native Method) at cad.flux.kernel.dbmanager.FGCProjectDbAdapter.evaluateInstances(FGCProjectDbAdapter.java:1004) at cad.flux.kernel.dbmanager.FGCProjectDbAdapter.evaluateProjectInstances(FGCProjectDbAdapter.java:961) at cad.core.kernel.dbmanager.DbManager.evaluateProjectInstances(DbManager.java:2081) at cad.core.kernel.components.TransactionCreateInstance.processDBEvaluation(TransactionCreateInstance.java:416) at cad.core.kernel.components.TransactionCreateInstance.commit(TransactionCreateInstance.java:330) at cad.core.kernel.components.TransactionManager.commit(TransactionManager.java:292) at cad.core.kernel.components.TransactionManager.processTransactionCreateInstance(TransactionManager.java:652) at cad.core.kernel.components.TransactionManager.newProjectInstance(TransactionManager.java:739) at cad.flux.kernel.FGSupervisor.newProjectInstance(FGSupervisor.java:3502) at sun.reflect.GeneratedMethodAccessor378.invoke(Unknown Source) at sun.reflect.DelegatingMethodAccessorImpl.invoke(DelegatingMethodAccessorImpl.java:43) at java.lang.reflect.Method.invoke(Method.java:498) at org.python.core.PyReflectedFunction.__call__(PyReflectedFunction.java:186) at org.python.core.PyReflectedFunction.__call__(PyReflectedFunction.java:204) at org.python.core.PyObject.__call__(PyObject.java:507) at org.python.core.PyObject.__call__(PyObject.java:511) at org.python.core.PyMethod.__call__(PyMethod.java:156) at pydb$py.newObject$203(pydb.py:1586) at pydb$py.call_function(pydb.py) at org.python.core.PyTableCode.call(PyTableCode.java:167) at org.python.core.PyBaseCode.call(PyBaseCode.java:170) at org.python.core.PyFunction.__call__(PyFunction.java:434) at org.python.core.PyMethod.__call__(PyMethod.java:156) at pydb$py.__call__$159(pydb.py:1261) at pydb$py.call_function(pydb.py) at org.python.core.PyTableCode.call(PyTableCode.java:167) at org.python.core.PyBaseCode.call(PyBaseCode.java:307) at org.python.core.PyBaseCode.call(PyBaseCode.java:198) at org.python.core.PyFunction.__call__(PyFunction.java:482) at org.python.core.PyMethod.instancemethod___call__(PyMethod.java:237) at org.python.core.PyMethod.__call__(PyMethod.java:228) at org.python.core.PyMethod.__call__(PyMethod.java:223) at org.python.core.PyObject.invoke(PyObject.java:3697) at org.python.core.PyInstance.instance___call__(PyInstance.java:377) at org.python.core.PyInstance.__call__(PyInstance.java:372) at org.python.core.PyObject.__call__(PyObject.java:405) at org.python.pycode._pyx113.f$0(<input>:1) at org.python.pycode._pyx113.call_function(<input>) at org.python.core.PyTableCode.call(PyTableCode.java:167) at org.python.core.PyCode.call(PyCode.java:18) at org.python.core.Py.runCode(Py.java:1398) at org.python.core.Py.exec(Py.java:1442) at org.python.util.PythonInterpreter.exec(PythonInterpreter.java:276) at cad.core.kernel.components.PythonWrapper.runCode(PythonWrapper.java:628) at cad.core.kernel.components.PythonWrapper.runsource(PythonWrapper.java:623) at cad.core.kernel.components.PythonWrapper.runsource(PythonWrapper.java:598) at cad.core.kernel.components.PythonWrapper.runsource(PythonWrapper.java:593) at cad.core.kernel.components.PythonWrapper.execute(PythonWrapper.java:638) at cad.core.kernel.components.PythonWrapper.executeNewCommand(PythonWrapper.java:756) at cad.core.kernel.KernelModule.executeNewCommand(KernelModule.java:104) at cad.core.kernel.actions.implementation.type.CreateInstanceAction.doAction(CreateInstanceAction.java:108) at cad.core.common.dynamic.actions.UIActionManager.postAction(UIActionManager.java:145) at cad.core.common.dynamic.actions.UIActionManager.postAction(UIActionManager.java:274) at cad.core.kernel.KernelCommon.postAction(KernelCommon.java:306) at cad.core.kernel.encoder.ActionServerRequestsInputPlug.postAction(ActionServerRequestsInputPlug.java:88) at cad.core.kernel.encoder.ActionServerRequestsInputPlug.postAction(ActionServerRequestsInputPlug.java:82) at stdcom.protocole.actionserverrequests.ActionServerRequestsRouter.postAction(ActionServerRequestsRouter.java:70) at stdcom.protocole.actionserverrequests.ActionServerRequestsOutputPlug.postAction(ActionServerRequestsOutputPlug.java:96) at cad.core.frontal.decoder.FrontalDecoder.postAction(FrontalDecoder.java:464) at cad.flux.frontal.actions.implementation.algo.postpro.ExecuteEntityWithResult.postAct(ExecuteEntityWithResult.java:63) at cad.core.frontal.actions.implementation.type.CreateInstanceAction.interpret(CreateInstanceAction.java:309) at cad.core.frontal.components.box.frontaldialog.FrontalDescriptorDialogBox.internalRun(FrontalDescriptorDialogBox.java:296) at cad.core.frontal.frontalthread.WorkerThread.executeImplementer(WorkerThread.java:226) at cad.core.frontal.frontalthread.WorkerThread.run(WorkerThread.java:274)
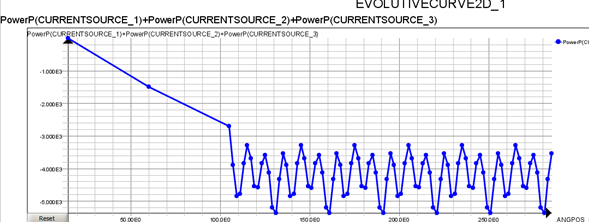
Also I'm having a hard time calculating the power balance manually. Because FLUX tells me that the power input is 6000W and the mechanical output is 4200W, however when I sum the joule losses+ the bertotti losses I get 4200+400=4600W. So where are the others 1400W (6000-4600) ?
I'm nearly sure I'm calculating it correctly. But I'm asking because I'm new to flux and I'm still understanding how it works. Is this difference normal or I am missing something?
I can give you my solved flu project, but I'd have to send it directly to you since the link expires after one download
Thanks, have a good day!