Hello,
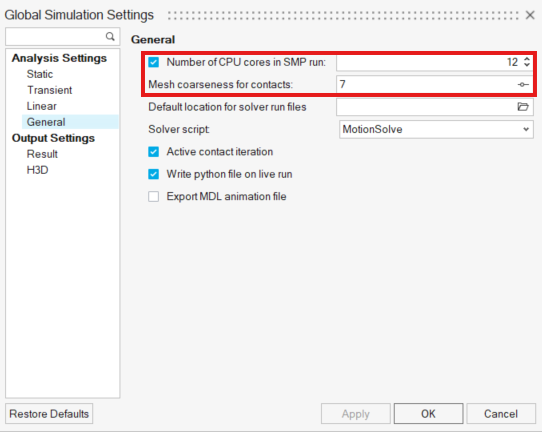
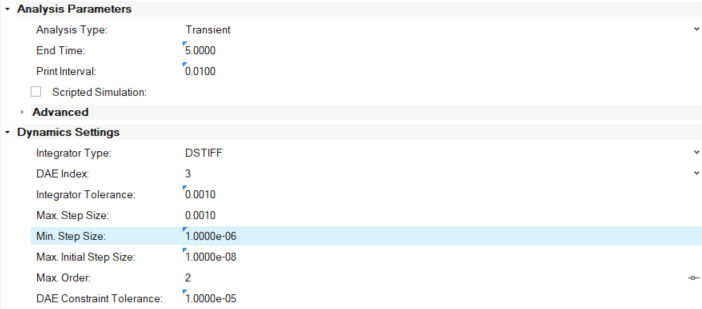
I am running a chain and sprocket model with idlers. But the time step becomes smaller as it runs and the animation falls apart.
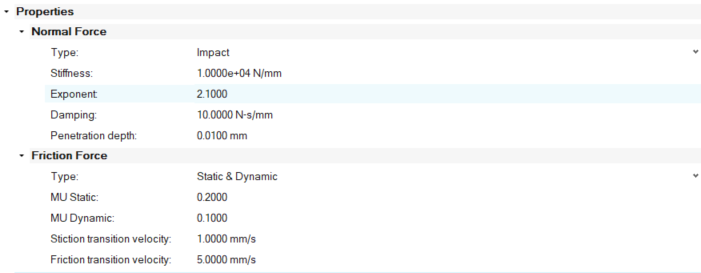
I set the joints as revolute joint with one compliant, and contacts are 'links&cutters to middle idler', 'links&cutters to bottom idler', 'links to sprocket'.
I tried to debug, it seems that if I involve 'links&cutters to bottom idler' contact, problem occurs.
Anybody has any idea what is wrong?
Thanks,
Keyu