The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
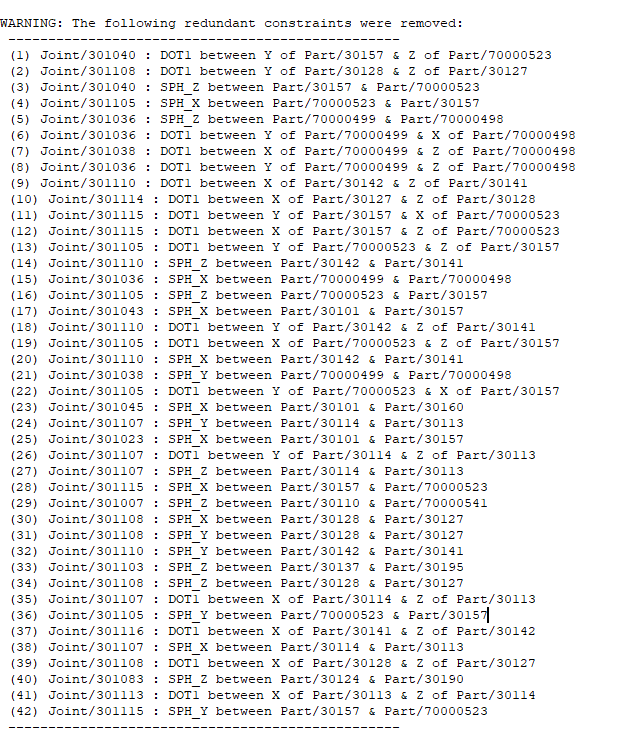
Hi i am getting following warning.
Even though i am able to do full simulation .
how it can be resolved. I am using very big linkage chain with lot of joints contacts and very high dynmaic force ( 12 kN range).
Any suggestions.
thanks and Regards
Hello @deepak3139,
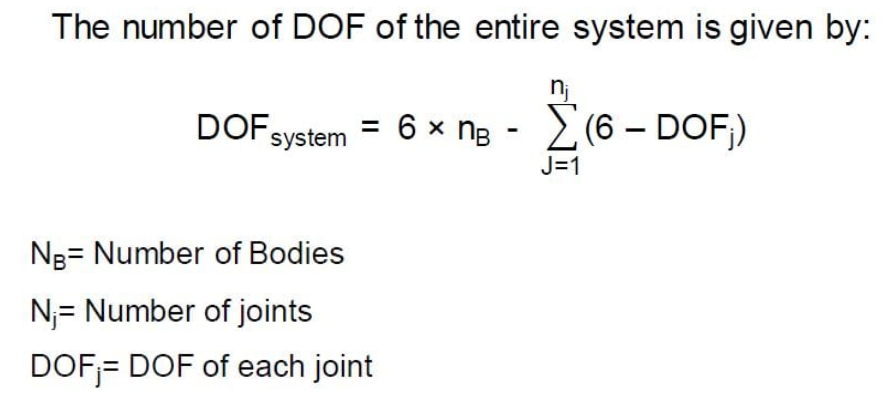
The warnings you are seeing in the .log file are the redundancy warnings. Wherein the bodies in the model are over-constrained. The solver tries to remove these joints automatically. Refer to this image below on how the DOF is calculated.
Let’s say you have a rigid body in 3D space:
➡️ The revolute joint is redundant in this case, since the fixed joint already fully constrains the body.
So you need to change the joint types, and number of joints for each bodies, so that the model is completely constrained properly. If you are new to MBD and Motionview/Motionsolve I'd recommend to go through the eLearning:
Getting Started with MotionView/MotionSolve
Hi @deepak3139,
Those are simply warnings, not errors, that your model features redundant constraints. Those redundant constraints will have some or all of their constraints deactivated because kinematically they are not needed.
It is a good practice to try and reduce the number of redundant constraints, however this will likely not effect anything in your results.
Hope this helps!
Adam Reid