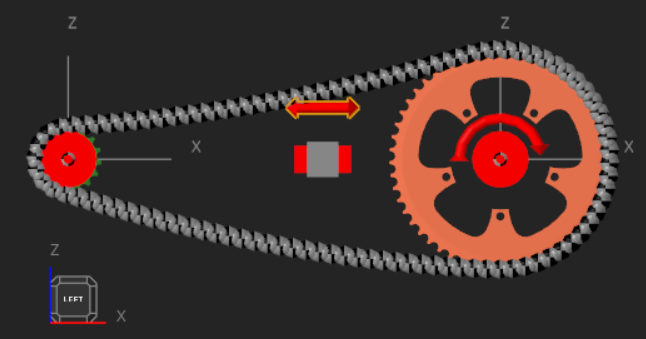
Description: i am a student, new to motionview, and i want to simulate a gear rolling forward and at the same time moving forward. But these two motions are independent, like the gear on the bike when bike is moving, the rolling and moving are not related, they have different velocity.
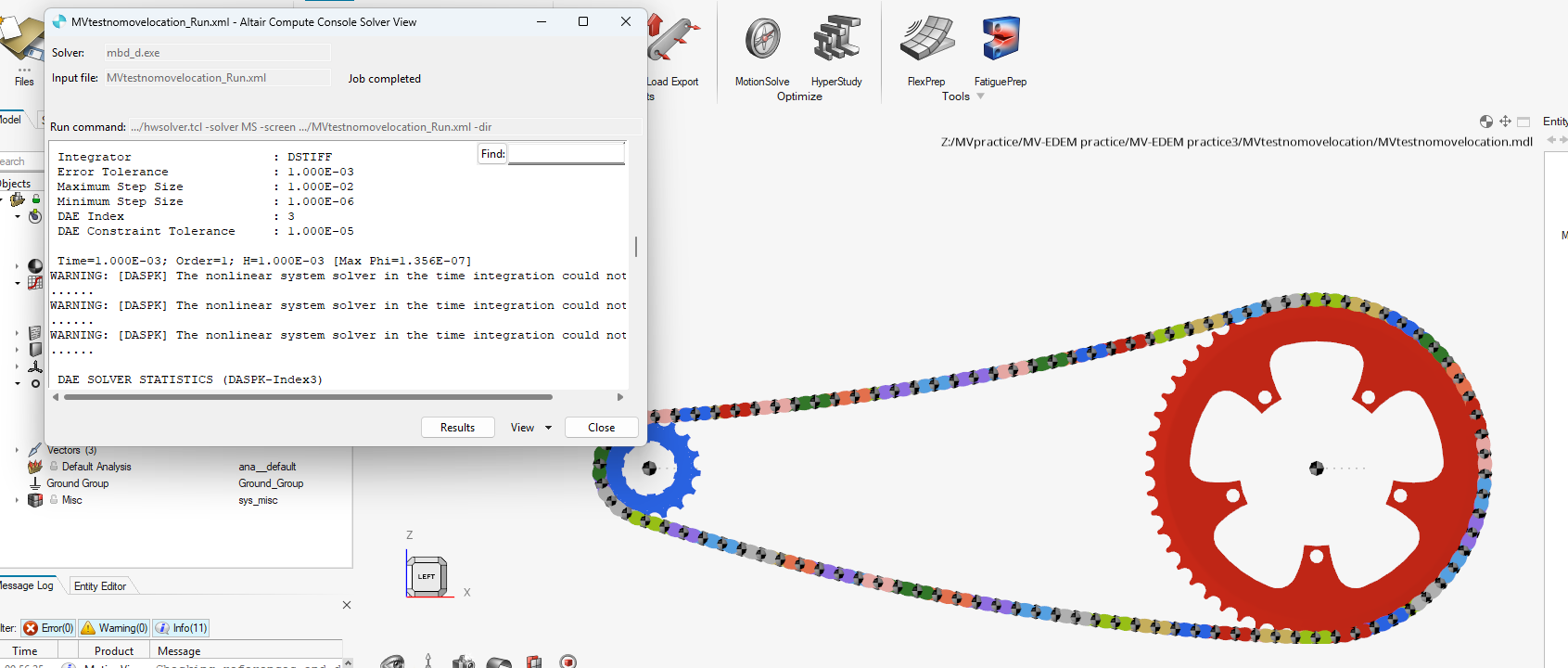
i tried to use a revolute joint and translational joint, but the log reports redundant constraints warning, and the animation is also incorrect.
therefore, i'm kindly asking for help, thank you.
Product/Topic Name : motionview2023.1