I apologize for the length of this message.
I have been working on this simulation for a very long time, but it is still not going well, and I’m honestly feeling so discouraged that I’ve started wondering if I should leave school.
I feel I’ve reached the limit of what I can do alone, so if anyone is available to take a look, I would be truly grateful for your help.
I am currently running simulations to compare the landing behavior of a drone in the following two cases:
- A drone with standard legs only
- A drone with granular damper legs equipped with shafts and springs
Model Overview
- The CAD model is solid, but the real wrench is hollow, which leads to a significant difference in mass.Therefore, I measured the actual mass of the wrench and adjusted the material density in MotionView so that the total mass of the model matches the real object.
- Leg Material: Aluminum alloy is used.
- Ground Material: Since the goal is not to evaluate shock absorption by the ground, but rather to clearly observe the energy absorption of the legs, I used steel to create strong rebound forces from the surface.
Questions
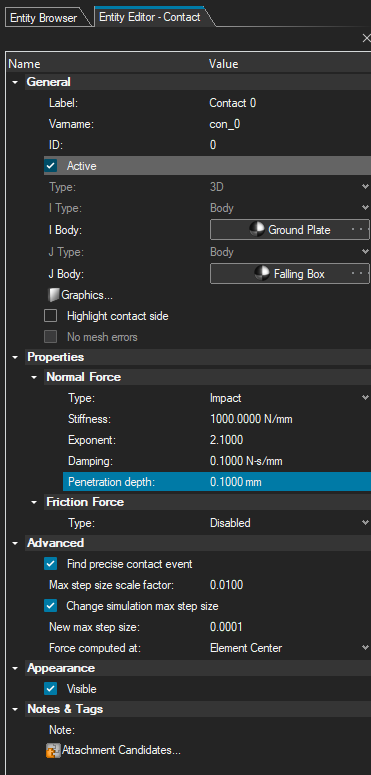
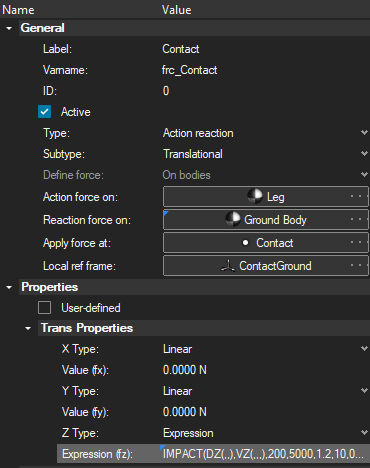
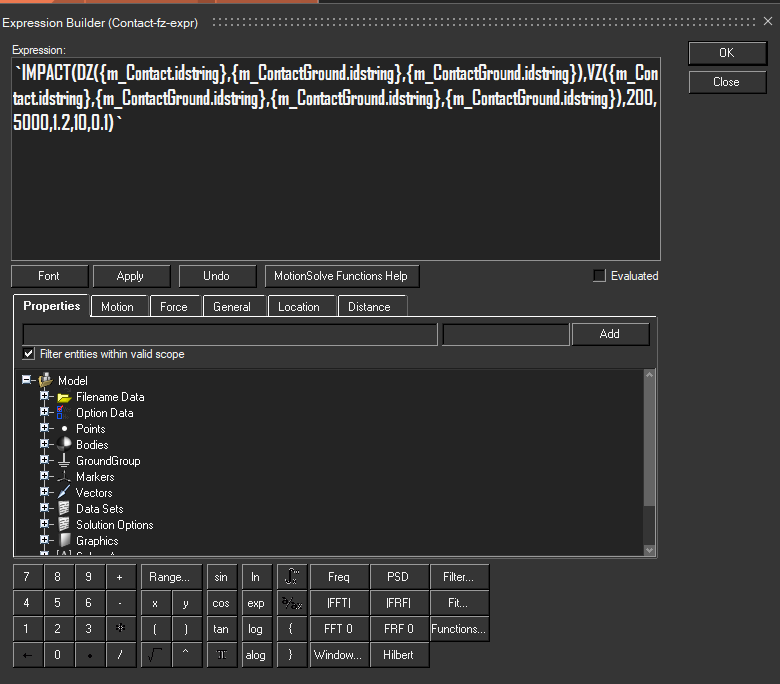
1. About Contact Settings
When I previously asked for advice, I was told to adjust the stiffness (K) and damping (C) based on the penetration depth.
In this case, since the ground is assumed to be steel, I am aiming to keep the penetration depth below 0.01 mm.
However, when I increase K, the penetration depth decreases at first, but beyond a certain point, it starts increasing again, which has been very difficult to manage.
I would greatly appreciate it if you could let me know whether this behavior is reasonable, and what appropriate settings might look like.
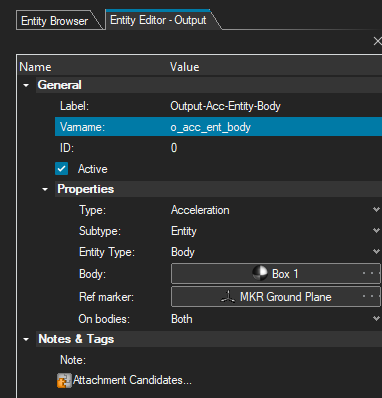
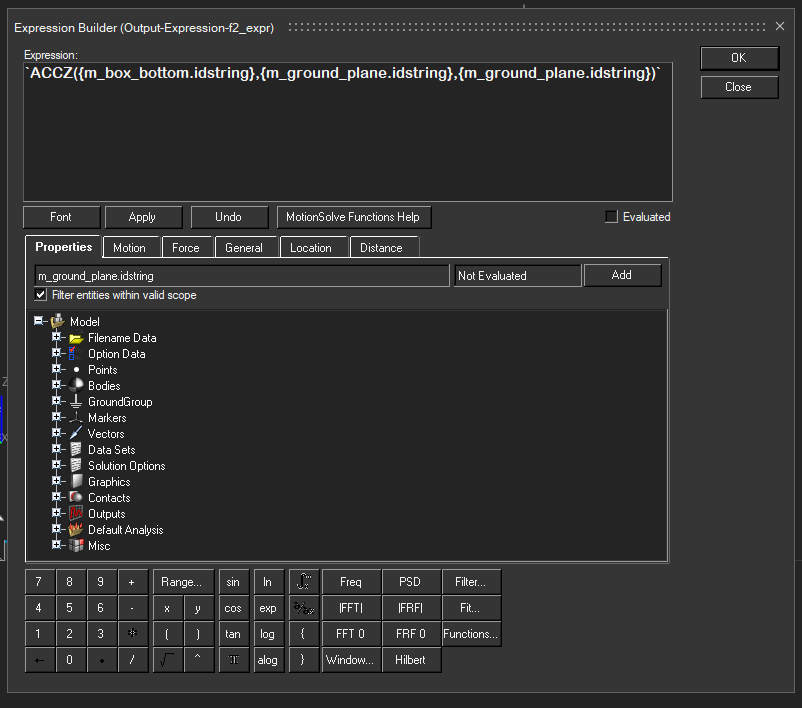
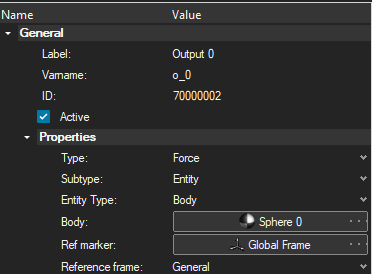
2. About Output of Acceleration and Impact Force
I was able to obtain a graph of the height (Z-coordinate), but I’m not sure how to output the following:
- (a) Acceleration of the main body relative to the ground (especially vertical)
- (b) Total impact force acting on the main body
I will attach one MotionView file and two EDEM files, and would be very grateful if you could check whether my settings are correct and advise me on the output procedure.
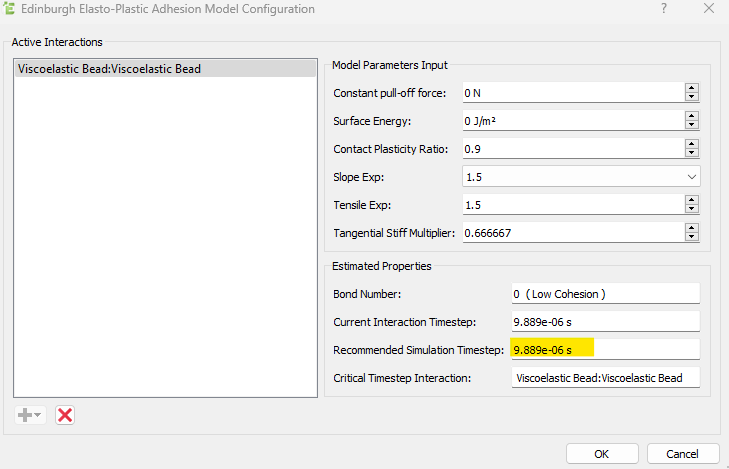
3. About Particle Settings
I’m also struggling with the particle settings in EDEM.
I introduced granular dampers to reduce impact force and rebound, but paradoxically, adding particles actually increases the rebound, which defeats the purpose.
The particles are made of elastomeric material, but if I lower the Young’s modulus any further, EDEM displays the value in red, so it seems I’ve reached the lower limit of what’s acceptable.
Also, if I enable interaction between particles and geometry, the particles fly out of the container, so I haven’t been able to apply this setting at this point.
As for the particle material, I am open to any option that reduces rebound and impact force acting on the main body.
Here are the current Hysteretic Spring Model parameters used for particle–particle interaction:
- Interaction: Viscoelastic Bead : Viscoelastic Bead
- Damping Factor: 0.9
- Stiffness Factor: 0.6
- Yield Strength (Pa): 5.0 × 10⁶
I will send the files related to my current simulation for your review.
If there is anything missing, I will supplement it immediately.
Thank you very much for your time and support.