The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
I got this result from EDEM-motionview coupling.
The boundary condition is a constant force on drilling head.
How can I gain the total resistance backward on the drill head and body separately.
And the resistance movement on the drilling head.
Hi @QinHe_321,
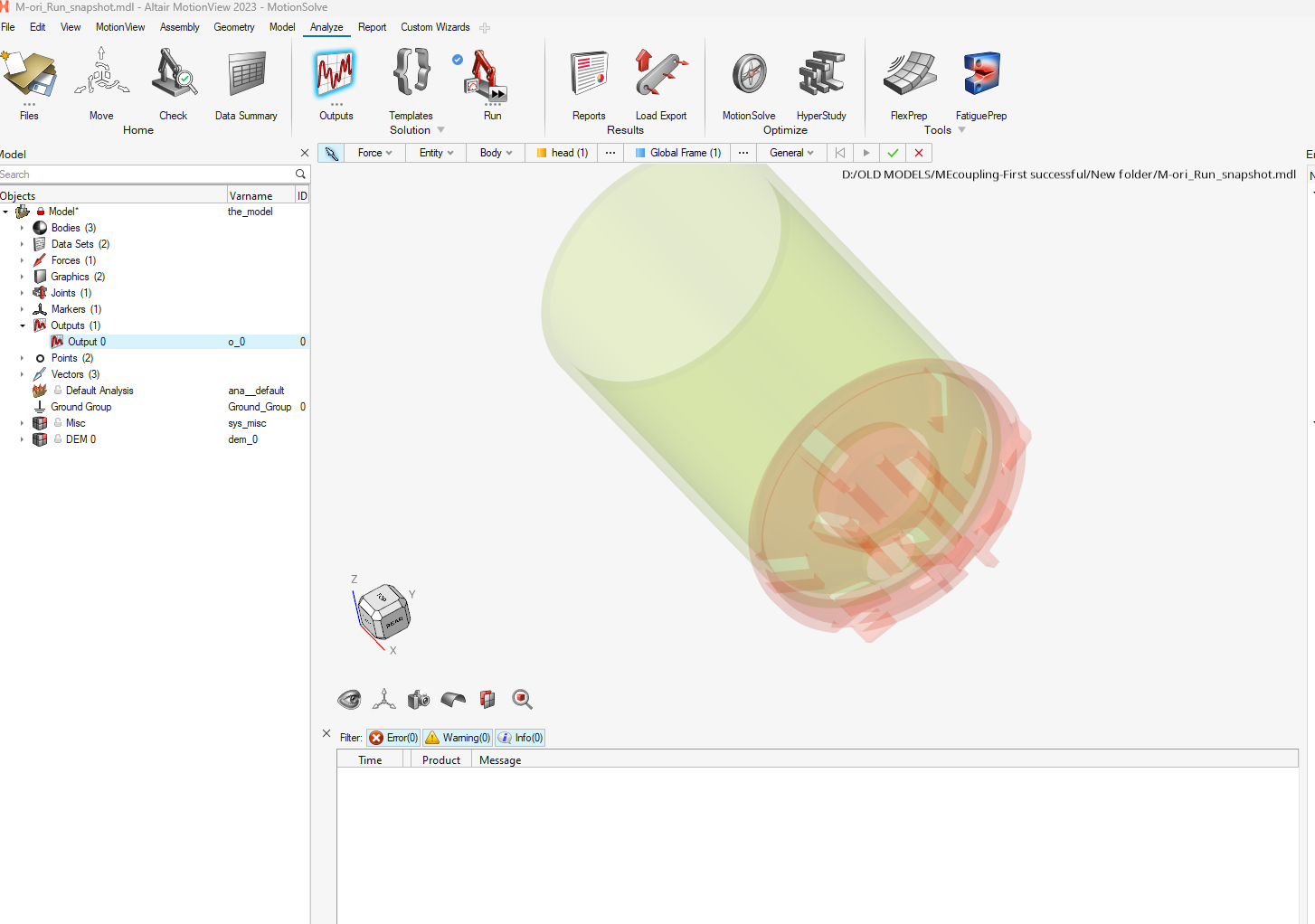
The total force on a body can be measured using an Output-Force-Entity-Body type:
However, the forces in the system can also be measured on the joints in your MotionView model:
If the drill body is fixed to ground, the drill head is connected by a revolute joint, and the movement is supplied by a force on the drill head, then you can measure the difference in forces/moments at these three locations to examine the various losses due to the bulk material.
Hope this helps!
Adam Reid
Use the green check mark to move on from modifying the first output (Output 0) and define a new output.
It looks like it is failing to write to that directory. Does it no longer exist? Try saving the model to a local directory like the Desktop instead.
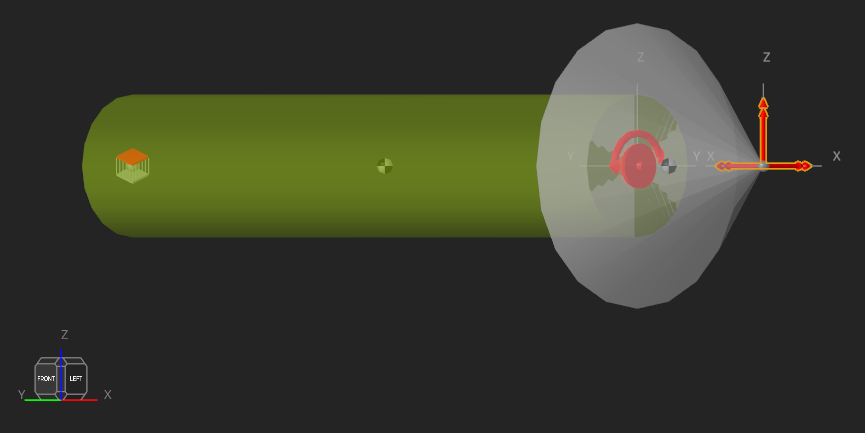
Capturing the resistance torque can be done solely through joint monitoring. I mocked up this example to make it easier:
I replicated your drill system, with a drill shaft (yellow) and drill head (grey). The shaft is connected to ground via a fixed Joint and the shaft is connected to the head via a revolute Joint. The movement is supplied via a Motion and the resistance is replicated with a torque.
The Motion follows a STEP function where the drill head ramps up to the target speed over 0-1 seconds and is applied to the revolute Joint. The resistance is introduced over 2-4 seconds and is applied to the tip of the drill head. If we plot the torques from the joint and the resistance torque, we can see the change in the required torque from the Motion to achieve the target speed because of the added resistance:
The top right plot is the applied torque to achieve the desired rotational velocity. The bottom right plot is the introduced resistance that we are trying to 'find' in your model.
Once the target speed is achieved, the input torque essentially drops to 0 N at 1 second since there isn't any resistance. As the resistance torque is introduced at 2 seconds, we can see the input torque increase to the exact amount as the resistance (1000 N) to maintain the target speed.
By monitoring the change in required torque, we can calculate the resistance.
Please find the model attached here for your review:
Hope this helps! Adam Reid
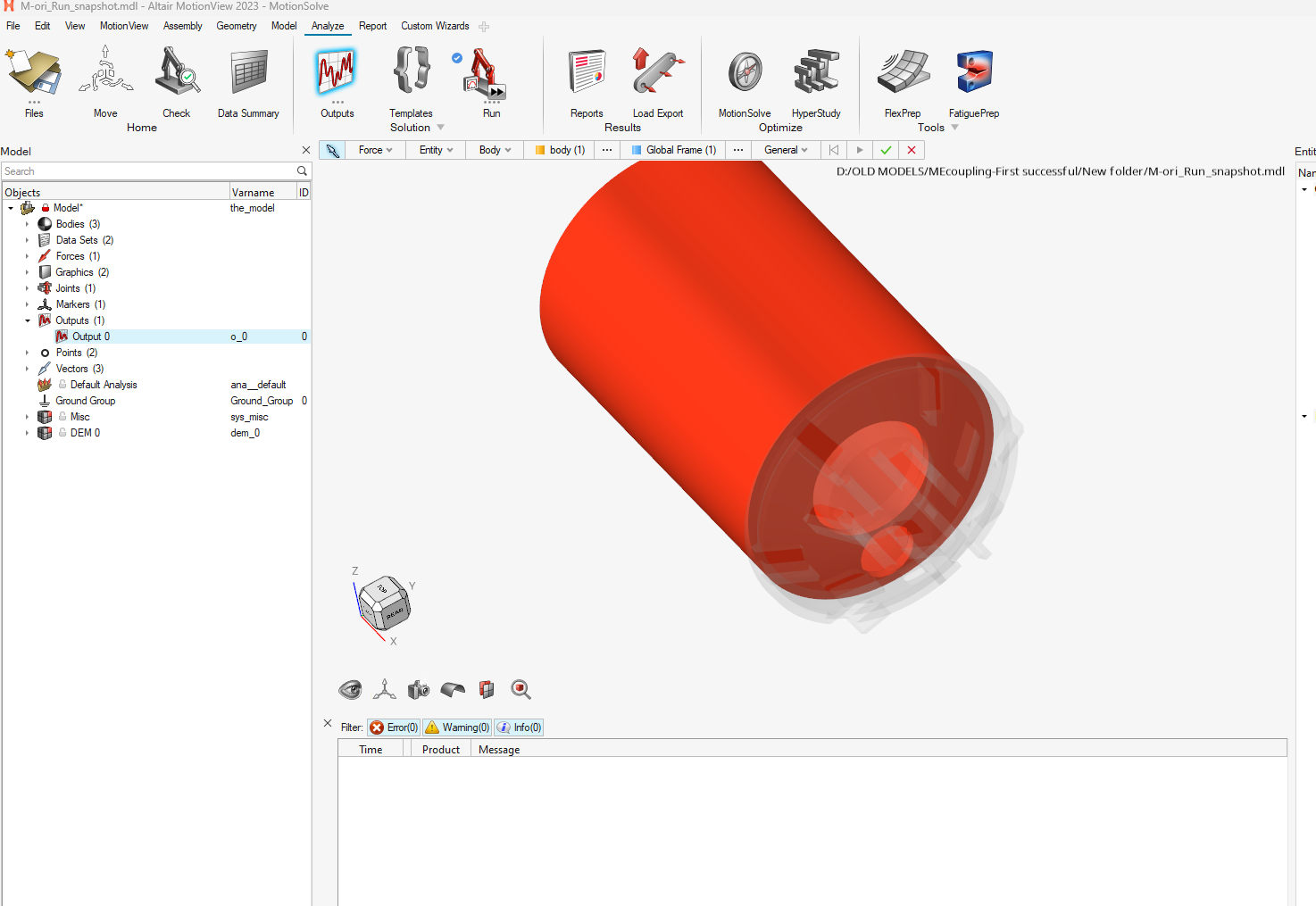
I met two following question while moving on, one is that after establish output for head, I cannot establish a new output for body. As you can see the create button is grey and no response.
Second is the motionview do not have access to mdl document, does output required to set before simulation?
This happens when I try to save the document.
Where will the results be, in animation or ori?
Thank you for your assistance.
This method collect the force applied through joints, not force from all aspects, EDEM forces are not included in joints.
You are really helpful, sorry for my slow response.