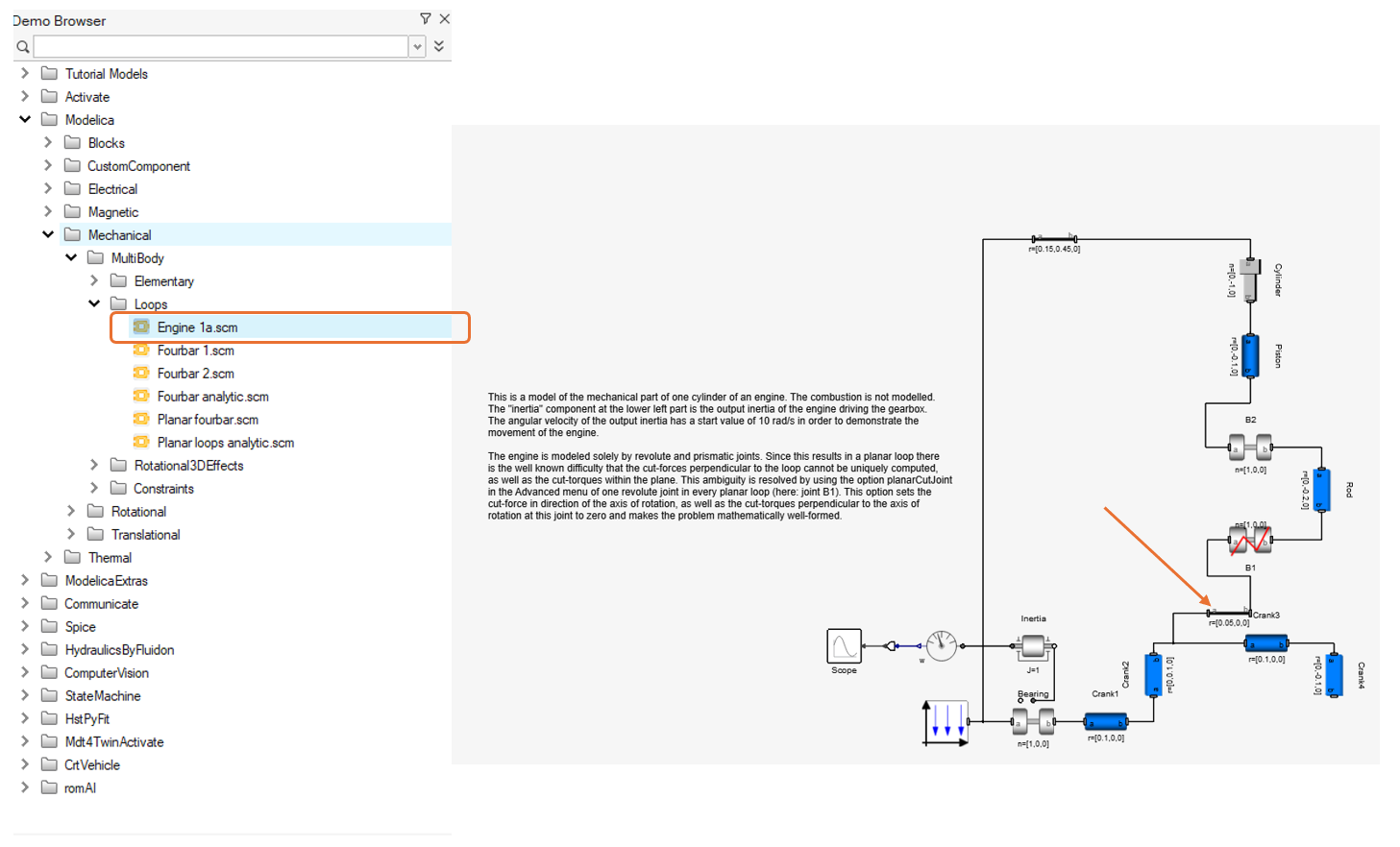
I have this Linkage:
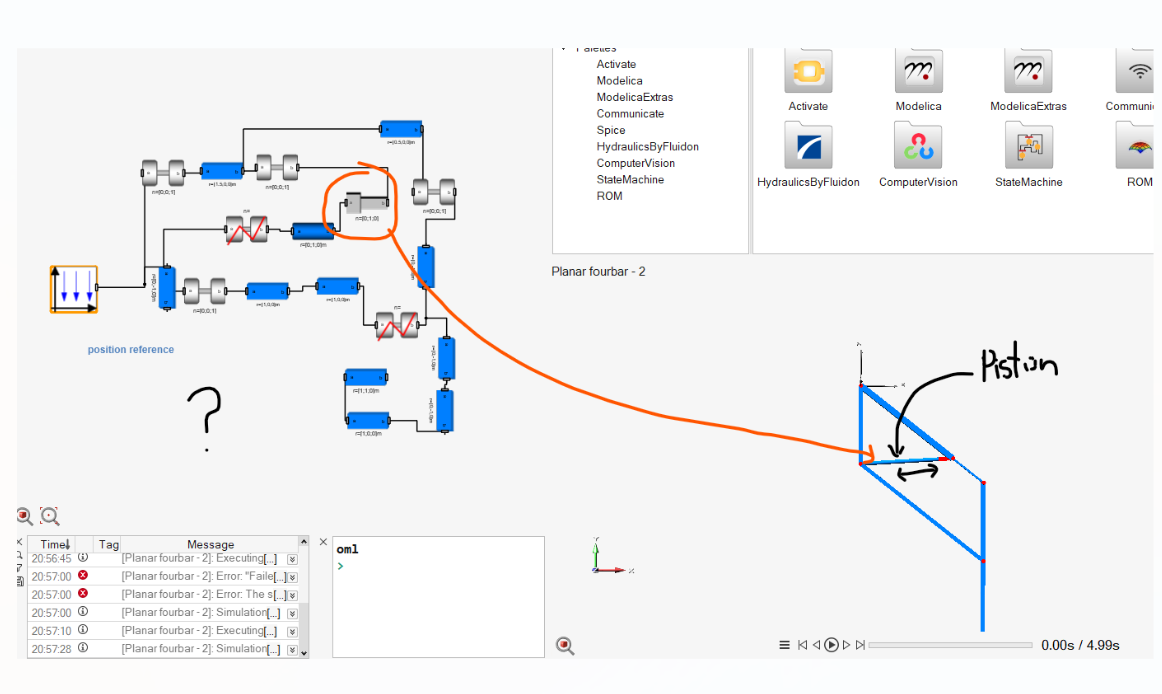
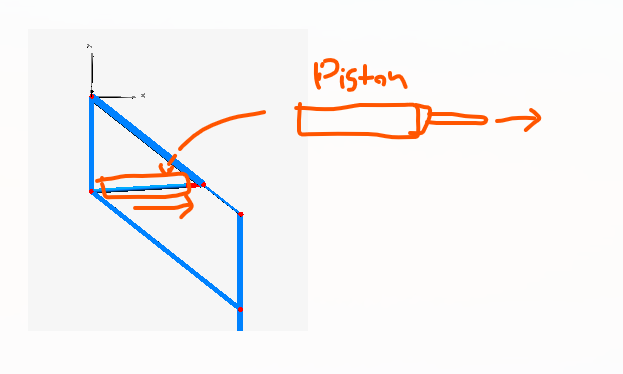
I would like the linkage pointed out to act as a cylinder. In the position it currently is, the cylinder should be fully compressed, and it should push outwords:
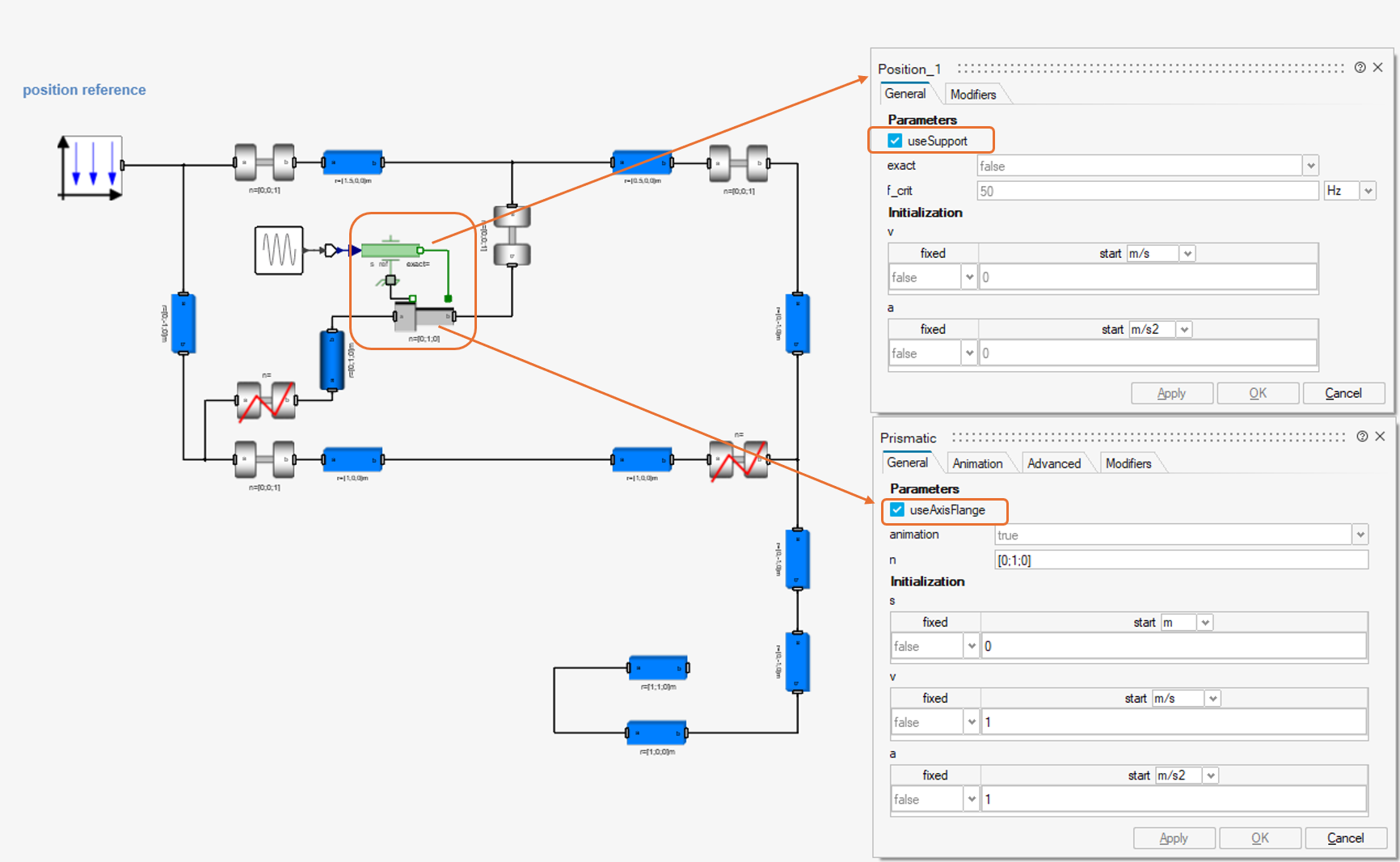
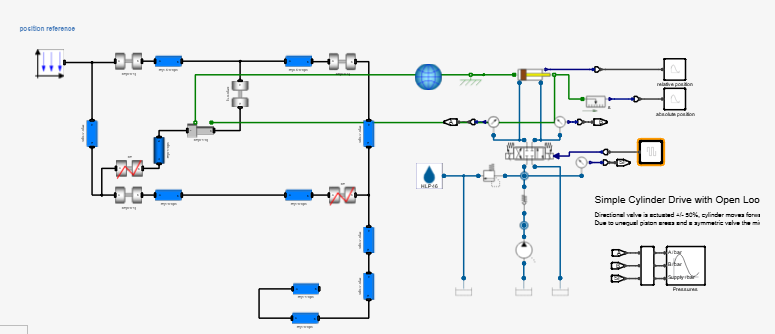
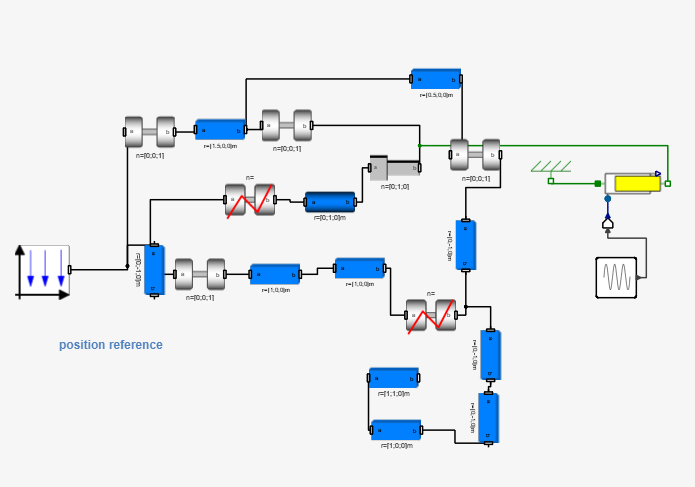
Currently, I have it as a prismatic joint but I need a cylinder to move it back and forth, I tried using the hydraulic blocks with a simple sin wave, or the actuation block but am not able to get it to work. Can someone help me on how I can add a hydraulic control system in this?
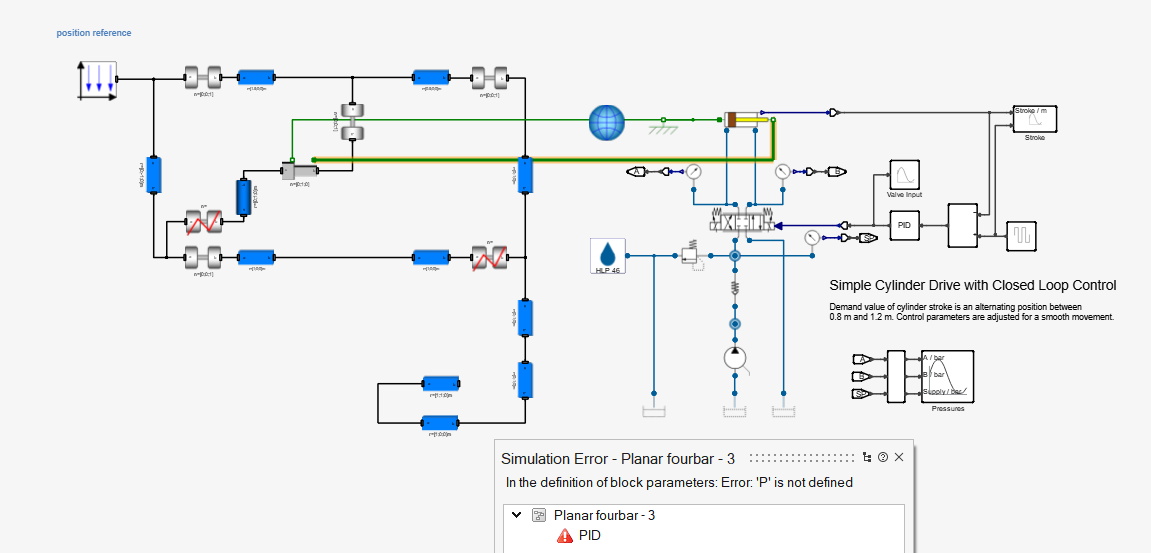
This is something else I also tried, but no luck:
I have attached my file.
Thanks!