Hi guys, I truly need your help.
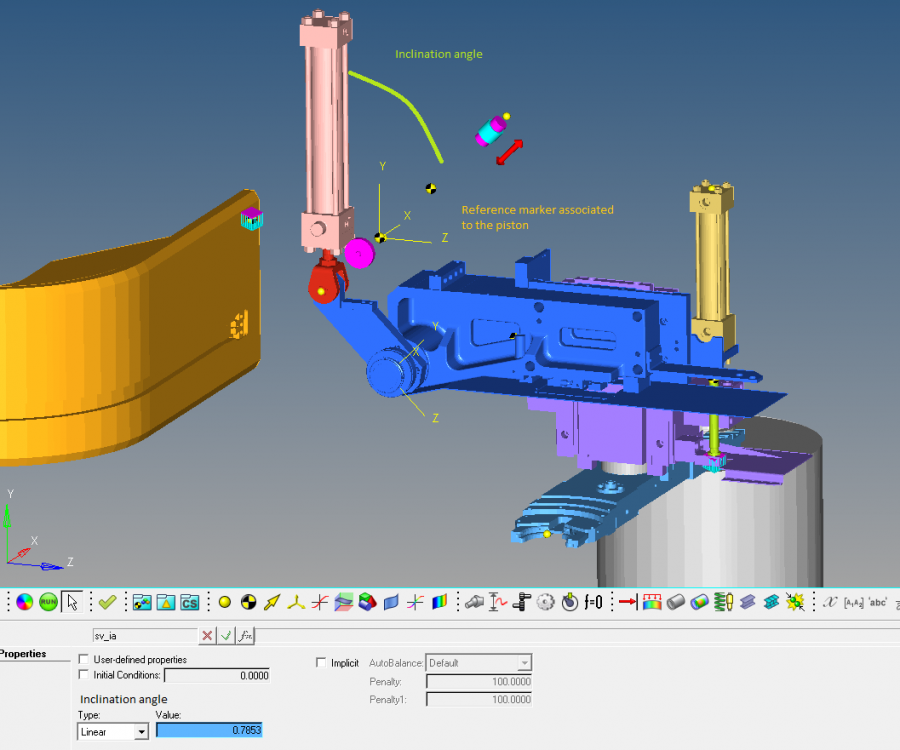
As you can see in the attached picture, I'm trying to understand if the initial inclination of the pneumatic cylinder has any effects on the torque needed to tilt the arm. I imported the CAD into my motionview model (Cylinder in vertical position) and I would like to know if there is any way to rotate the cylinder and its components (cylinder case and piston). I tried to achieve this result by defining the position of the Center of Mass as a function of the inclination angle (expressed as a solver variable, in order to optimize its value by using hyperstudy in a second moment), but I'm afraid that I simply translated the center of mass instead of rotate it (see picture), in fact the floating marker associated to the piston is not tilted.
How can I achieve this result?
How can I rotate the graphic too? (I tried with 'orientation' but I cannot fully understand which angles it desired as input)
Thanks for helping me in this matter.
<?xml version="1.0" encoding="UTF-8"?>