I am running a model in which the contact has interference. as part of the installation process one part is pushed along the second one, therefore there is a frictional contact between them. This is the error message I get:
*** ERROR # 6538 ***
Finite sliding (TRACK=FINITE) CONTACT 1 is not compatible with CLEARANCE
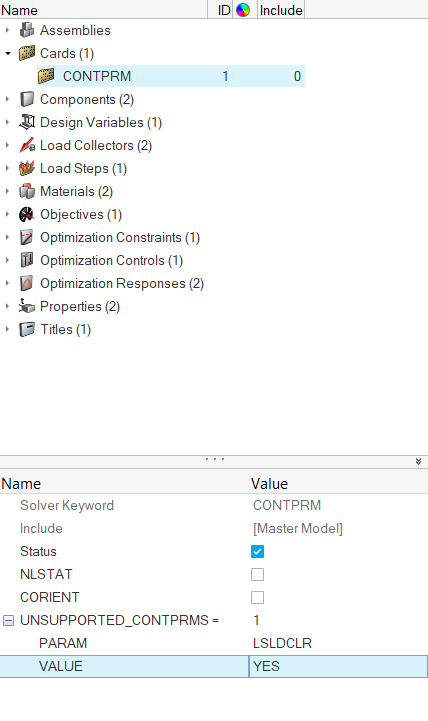
in LGDISP analysis. CONTPRM,LSLDCLR,YES can be set with caution to bypass the
restriction.
I am working with HW2019 and the option LSLDCLR is not available. is there an alternative way to solve this issue?
Any insights?