I have simulated a rolling contact between bicycle and road in Motionview. The type of contact defined is volume model between the road body and the tyre body. I have provided basic joints for the motion and some forces on the saddle and handlebar. When I plotted the forces acting on the front wheel joint, i got a graph of this form. The spike in the beginning is due to the cycle dropping freely onto the road but I would like to know why the spikes appear later on too in the force plot. I tried changing the damping coefficient values too, but the result has not much difference.
![]() <?xml version="1.0" encoding="UTF-8"?>
<?xml version="1.0" encoding="UTF-8"?>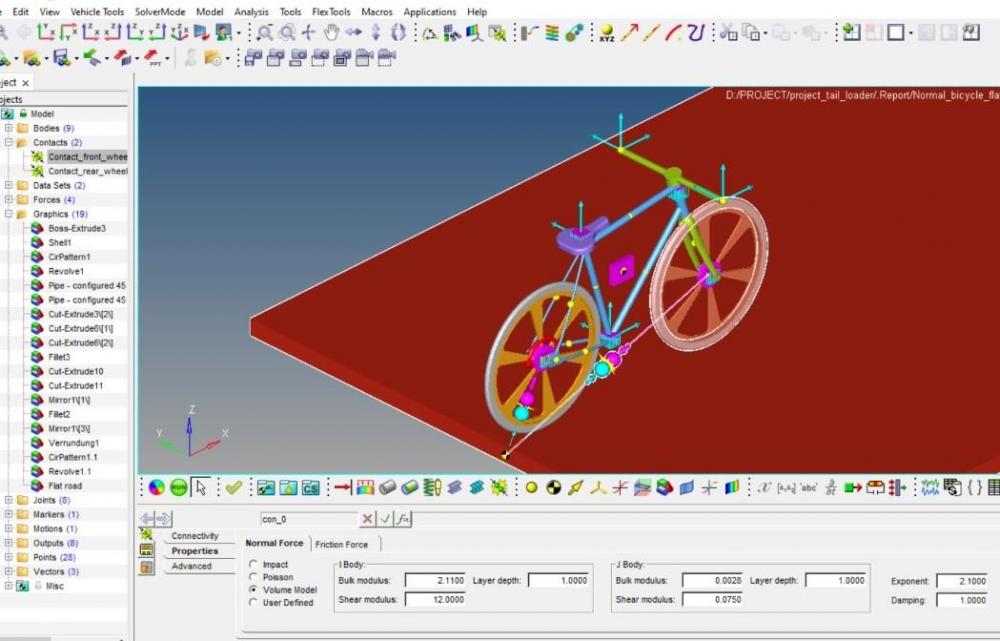
Bicycle model detailed
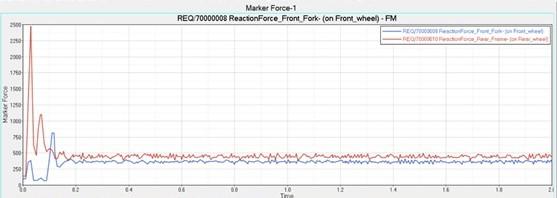
Force plot
Bicycle road model
