Hi all,
I have a model of a controlled drive unit with inputs and outputs. Now I want to use this unit several times in another model of a more complex machine, the main parameters (power, max. speed, max. displacement) should be the same in all instances of the unit. Furthermore, modifications should have effect on all units.
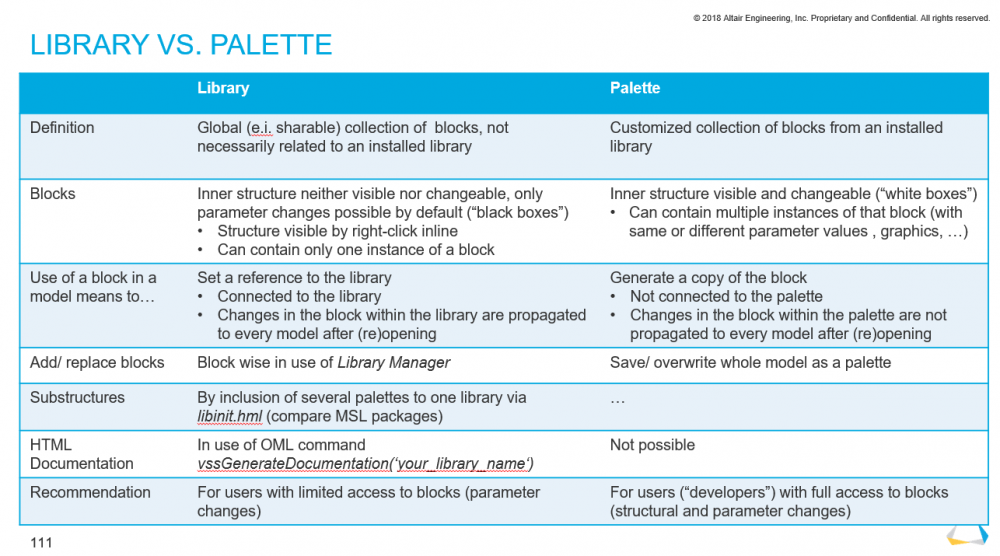
What I have in mind are two solutions: Supermodel of unit, that may be stored in a library (no common update of model possible), or an 'Include Diagram' construct.
What I haven't said yet: the interface ports of my drive unit should be Activate signal ports and Modelica ports  /emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20'> . Is this a killer criterion?
/emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20'> . Is this a killer criterion?
Thanks for your ideas!
Ronald