Bird Strike Simulation Divergence

Find more posts tagged with
Hyperman, thanks for the answer. I'm not sure why this was happening, however. I thought if you leave gapmin blank it is automatically calculated?
Edit: Additionally, according to the model, gapmin=(6.35e-3m+7.5e-4m)/2=0.00355, but using that value messes up the simulation. In your model, you took the pitch of the SPH particles and used that as the gapmin instead. Furthermore, in a previous post, you mentioned that the elements should be 5-10 mm in size at most, however in your model, they are about 27.5 mm.
Edit 2: I also forgot to mention: some of the aspects of my model are also taken from the example problem in the reference manual, the windshield birdstrike demo.
I tried to translate it into a newer file, which is more efficient like yours attached here, but allows for a smaller element sizes. The thing is, I used almost exactly the same parameters you did, but my simulation still hit 99% error.
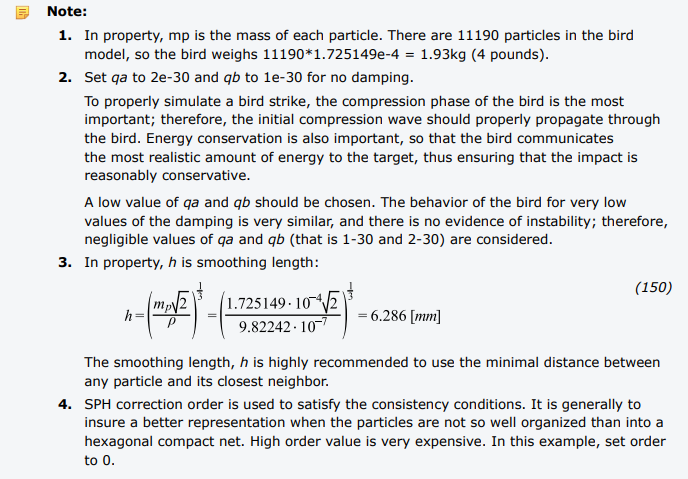
I also noticed you used qa=2.0 and qb=1.0. The tutorial recommends setting these values to a negligibly small value. Can you explain why not to follow that recommendation? For some reason, adhering to the demo causes divergence. For reference, this is in the 2019 reference manual:
Hi,
the energy error is coming from the bird component as hourglass energy. One major difference is the bird in your example weighs 11 grams, while in the tutorial it weighs 1.93kg. Unfortunately, I am not familiar with SPH theory to figure this one out /emoticons/default_unsure.png' title=':unsure:' />
Hi,
There was an issue with gapmin. Please set /INTER/TYPE7 , GapMin= the 1/2 the pitch you used to generate the SPH particles + 1/2 the thickness of the walls. The pitch is the distance between the particles so 1/2 the pitch is the radius :
https://community.altair.com/community?id=community_question&sys_id=5a66003a1b2bd0908017dc61ec4bcbdfSimulation controls were defined and the plate was modified for computational efficiency. Finished model from birdstrike tutorial is also attached.
Unable to find an attachment - read this blog