Hi,
firstly, let me introduce myself. My name is Javier and I'm a new user.
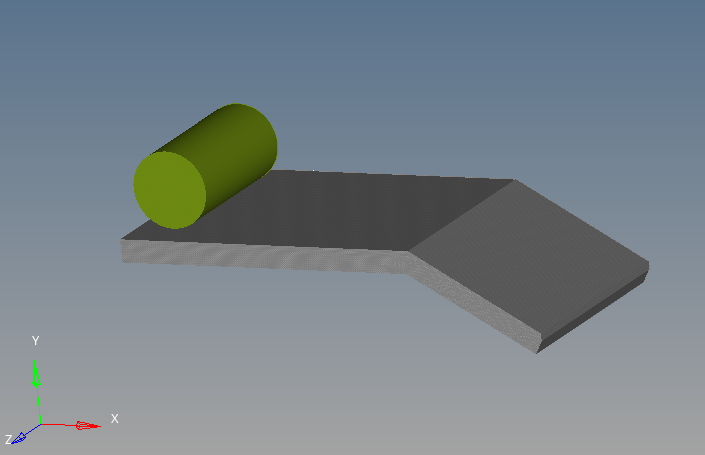
I'm trying to solve a rigid body problem on MotionSolve. The problem is a classical mechanics problem to study rolling without slipping (see attach picture for problem definition).
I'm trying to give a cylinder an initial rotational velocity about its longitudinal axis and then analyze if the cylinder will lose the contact force when it finds a plane that forms an angle of 30 degrees with respect the initial horizontal plane.

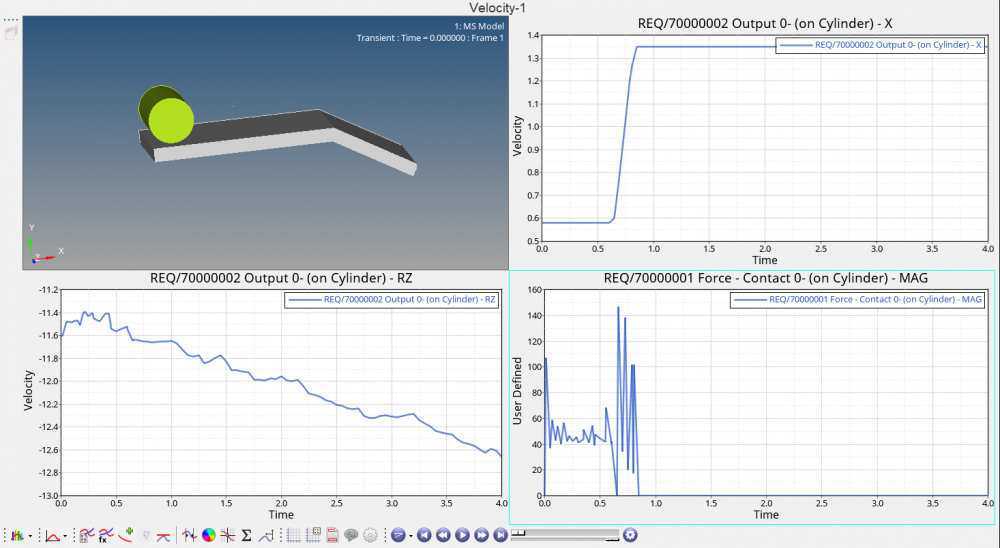
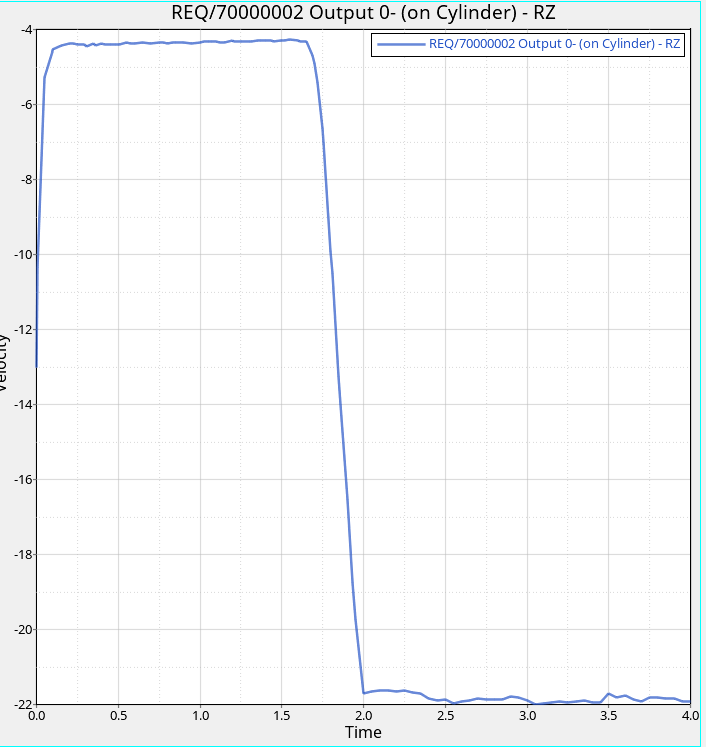
The contact seems to works nice, although I find some fluctuations on normal force even refining the mesh. The problem comes when I give the cylinder body an initial condition with a rotational velocity of -13rad/s . The analytical solution for the problem is -11.61rad/s. If I plot the rotational velocity I see the following curve:
I know maybe it has something to do with the friction coefficients and with applying the initial velocity on t=0seconds. So, since the analytical solution does not require any information about the friction coefficients, I would like to ask if someone knows a way to apply a velocity to the cylinder so that when it gets to the last point of the horizontal plane, it has a velocity equal to the analytical solution before start rolling from plane A to plane B.
Thanks in advance,
Javier