The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
@Deep
I am working on AOC model and I wanted to find out velocity and acceleration. How to find it?
Krunal,
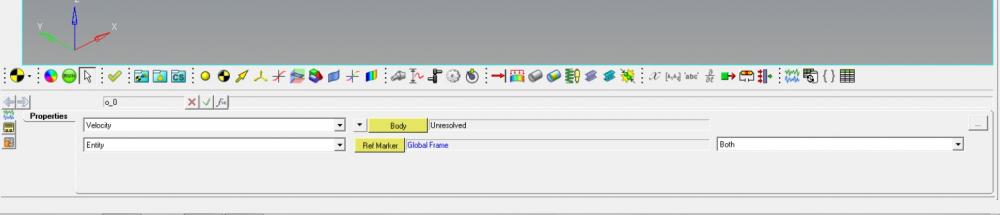
For velocity and acceleration or any other desired output entity you have to create output first
from that output property panel you can select on what (body, joint, bushing etc) you wanted to find velocity and acceleration
And after simulation you can view velocity and acceleration
FYI
<?xml version="1.0" encoding="UTF-8"?>
i have tried this option but there is no output available in post processing
there are all empty outputs
Hello,
You can view these results in HyperGraph
There will be specific output request is available in hypergraph after creating output in motionview
i have tried to open that file but there is some error message that it is unable to recognize
please share your entire message or screenshot if available
this error message
OK
This message indicate you are trying to open different file format
For Post-processing in HyperView you can open .H3D result file (H3D graphic file is different in motionview)
For Post-processing in HyperGraph you can open .plt, .abf, .mrf files to generate graphs
yes, I have tried all file and I found velocity in all the files and it is bit confusing
Do one thing create output as velocity in your MotionView file and save it in another folder
Run your simulation and open HyperGraph and open .plt file
In this .plt file you can view your specific values of output
yes it is working, but for other outputs like displacement etc do we need to create another output request??
yes krunal,
you have to create another otuput request for another entity like Displacement, force etc
if you want output on different joints you have to create different output request
(If you have three joints and you want two output velocity and acceleration you have to craete three output request of velocity on each joint and three output request of acceleration on each joint so you create total six output request)
is it possible to create a script to output acceleration on a flexible body on huge number of nodes
@Boris Nahmias
Can you explain a little better what do you want to do?
Assuming that you already have your model run, you could read the H3D in Compose and quickly read all data from a bunch of nodes with a single command. I'm not sure how familiar you are with Compose. It might be helpful
In fact I've found :readmultvectors('C:/Users/to04683/Documents/ALIZE/MODELE_JB/LGs_Integration-RigidAC-A321Data_New_Flex_REL.h3d','Transient','Deformation->Displacement (Flexbody/30301)','N1','N187','Z','Z','All')
but in fact my question is relative to acceleration in a flexible body during a motion solve run on many (higher than 50) on some nodes
I cannot create one request by node and want to use userroutine in matlab or python but seems to be limited and anyway need to create a marker for each node which is not convenient at all
KR