Hi,
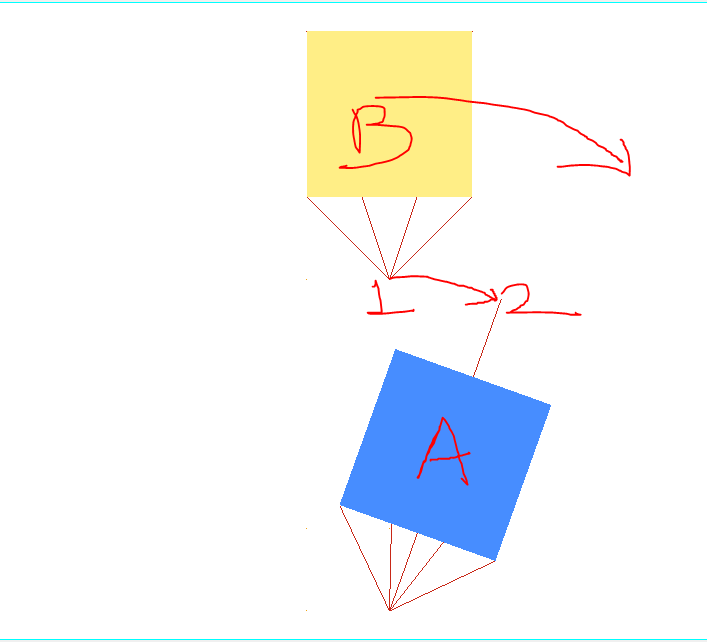
In the snip attached, I want rigidbody B to rotate with rigidbody A. To do this I have a movable reference system (/SKEW/MOV) defined on node 2 which is slave node of rigid body A and i have assigned a fix boundary condition for the master node 1 of rigid body B in this reference system. But it seems that the origin of the reference frame stays at its initial position and hence rigid body B is not making any motion. Can you help me figure out how to define motion of rigid body with a movable coordinate system.
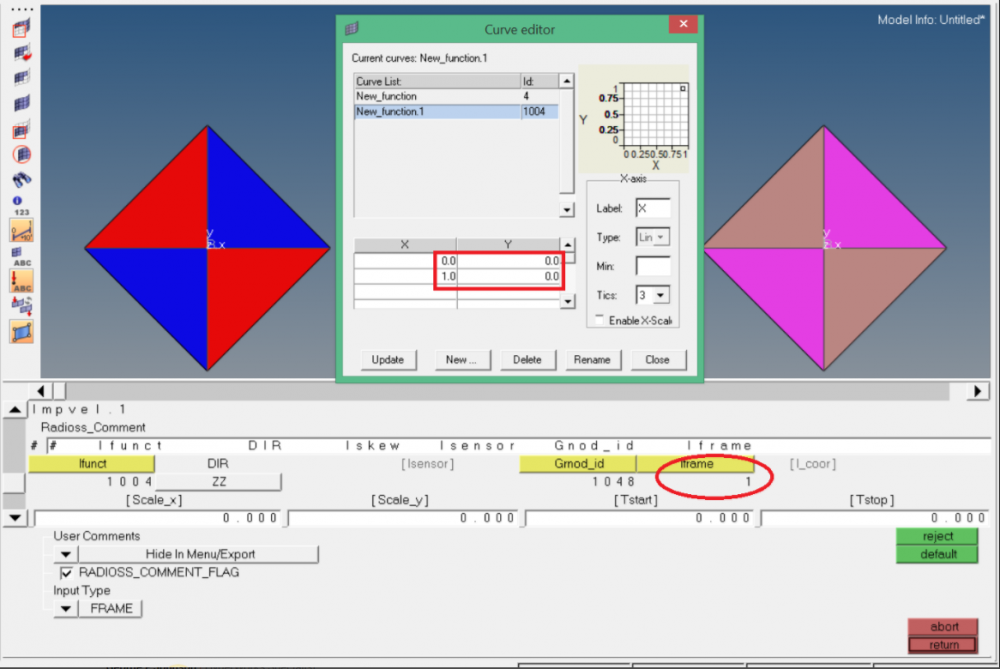
Also how do we define a /FRAME/MOV instead of /SKEW/MOV in hypermesh, which I guess can solve this problem.
There is no such option to define Frame under the BCS_collector section. So how do I achieve the motion of rigid body in a movable coordinate system.
Regards
<?xml version="1.0" encoding="UTF-8"?>