The Siemens Community Catalyst program was co-created with our community to acknowledge technology leaders who consistently contribute to the Siemens Community. Nominations are accepted on a rolling basis.
Hi,
Please let me know how to perform dynamic analysis on a front wheel suspension not on a full model vehicule, because my work is to analyse the front area and i don't have the complete model.
@riham1994
Can you explain what you mean by just suspension?
You can do a frontal car analysis which includes front suspension
The case i'm studying is a front suspension dynamic analysis, but among standard templates there is front suspension and full vehicule. For full vehicule choices in task wizard are dynamic analysis while in front suspension there is only quasi statique and static analysis. My question is how can i perform dynamic analysis on a front suspension.
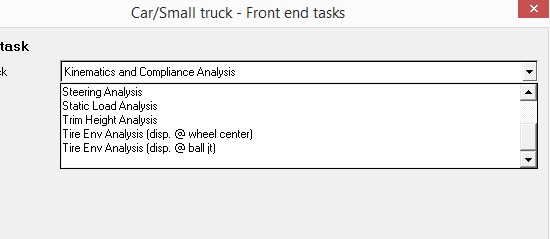
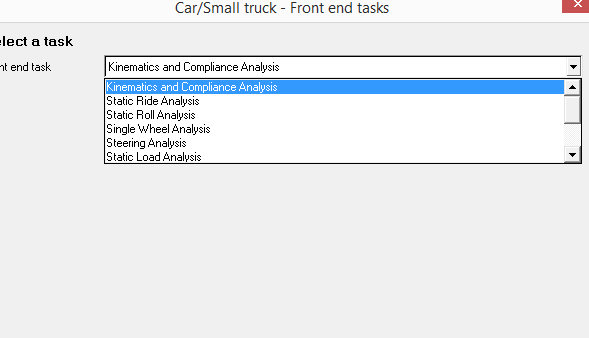
The below are the available analyses for front suspension. Let us know if you are looking for a different analysis type.
<?xml version="1.0" encoding="UTF-8"?>
i'm looking for a dynamic analysis such as cornering and acceleration analysis for a front suspension
Please answer me !!
RIght now analysis templates which need are available for full vehicle.
I am checking for front suspension alone.
You cannot perform dynamic analysis such as cornering for a front suspension alone, you can do such analysis for a full vehicle model.
Thanks,
Sushanth
The problem is that i have inertial matrix values for front suspension, not for the rear suspension. So when i perform analysis for full vehicule it shows this ERROR message : At time=5.403E+00 the integrator failed to proceed. ----------- Possible Causes ----------------------------------------------------- (1) The integration has become unstable. Tighten (decrease) integr_tol, h_max, or both in Param_Transient can help stabilize the integration. If the simulation contains distinctive phases, use multiple Simulate, each with its own proper integrator parameter setting, to selectively tighten the tolerance during the period where instability is encountered. (2) If the simulation was terminated because stepsize has diminished consistently below h_min, reduce h_min in Param_Transient to force integration to continue. (3) Non-physical inertia properties, such as mass=100 Kg and Ixx=Iyy=Izz=1 Kg*mm^2, or extremely small inertia on a part with an unconstrained degree of freedom. Make sure the modeling data, in particular the part inertia and the gravity, are specified in proper units consistent with the units given in Param_Unit element. (4) Beam, flexible body goes out of linear range, bushing has large rotation along more than one axis, curve goes out of its interpolation range, higher-pair joint goes out of the range of U or V, etc. Make sure fundamental modeling assumptions, such as rigid contact assumption used in Force_Contact, are not violated. (5) Motion displacement defined using LINSPL, AKISPL in dynamic analysis, or as a function of model states (DX, VX etc), as well as forces defined as a function of other forces, can cause hard convergence and integrator failure. Avoid these modeling practices wherever possible.
How can i solve the problem while i don't have inertial matrix values of the rear suspension ?