Hi there,
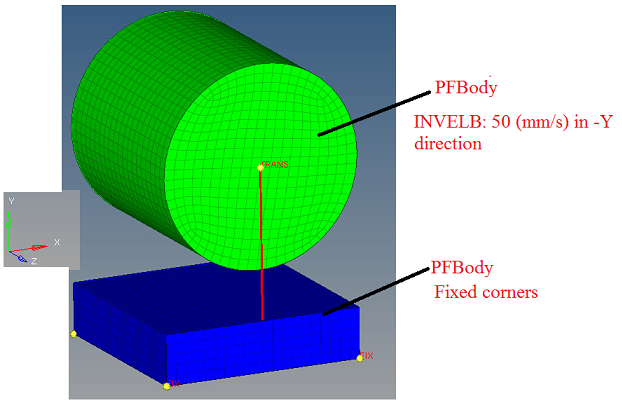
I'd like to set up a test simulation, where the green cylinder moves with a certain speed down (-Y) on the blue block.
I can't find the right way to set up the contact between the two bodies. In my case they don't get in contact an any time, the cylinder just fall through the block, although the cylinder should force the block to a deformation and don't move further.
Can somebody please tell me the right cards for concact type and entity set types (master and slave)??
MY SET UP at the moment:
- PFBODY: cylinder, block with nmodes=10, Craig-Bampton
- Ground: some nodes (for the 4 FIX an the one TRANS joint)
Concact: interfaces panel
type: MBCNTDS
master set:
outer grid nodes of the cylinder as SET_GRID card image
slave set:
block top nodes as MBDSRF card image
My goal in this test is a topology optimization of the blue block.