Hello there,
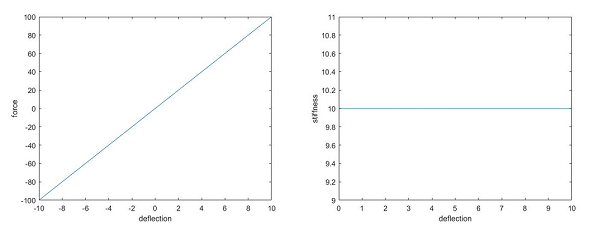
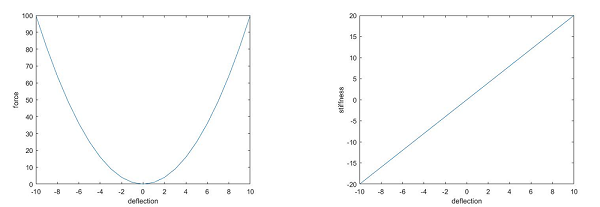
I need some advice for defining the stiffness of a spring damper element with a curve. My task is to model a 1 mass oscillator with a non-linear stiffness. But first of all I want to understand how to define a stiffness through a curve. So I tried to model a linear stiffness through the curve and verify it with the regular linear simulation.
My questions are:
- Can anybody tell me what I have done wrong with my curve definition?
- I defined a sinusodial force with +/- 10kN but the mass is just swinging in the negative area?
- Can anybody specify what the independent variable is? What do I have to put there when my curve is defined as force over displacement?
I have attached my files.
I appreciate every help  /emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20'>
/emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20'>