Dear Sir/Madam'
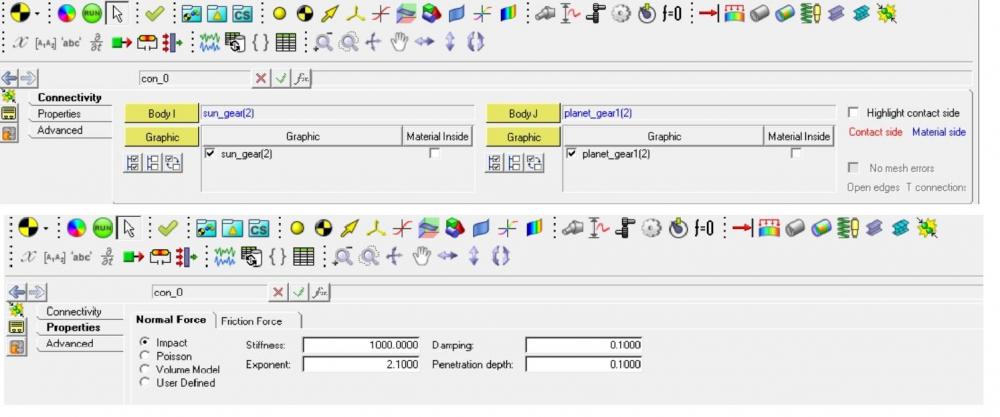
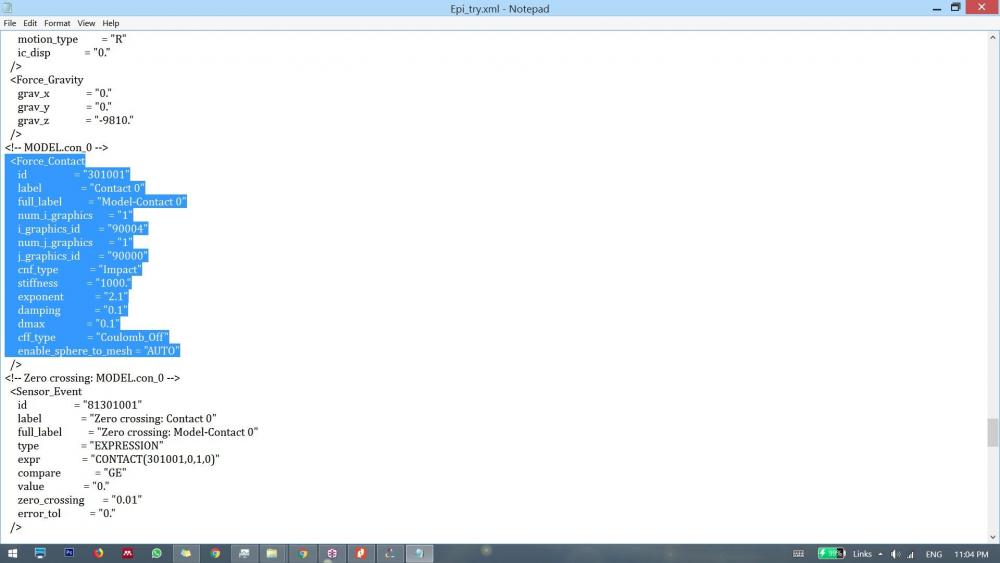
I have been trying to do a motion analysis required for a problem statement which is required in AOC-2019 contest. While I have tried a lot but every time I am facing 1 issue repeatedly in creating 'Contact' by '3D Rigid to Rigid Contact'. Every time I try to create the contact between two gears, while solving it says 'ERROR: Contact graphics undefined for contact force [id=301001]!'.
I have defined the bodies and selected their graphics also but it still shows the error. The image of the selections can be seen in the attachment. Kindly help me to solve the issue.
Regards
Pritish Shubham
<?xml version="1.0" encoding="UTF-8"?>