Modelica Multibody with fluidon library: connection element mismatch

Hello to all!
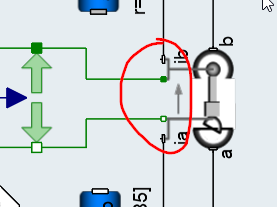
I found this error connecting modelica's element of my spring damper system with the multibody element of modelica.
<?xml version="1.0" encoding="UTF-8"?>
Which connector should i use?
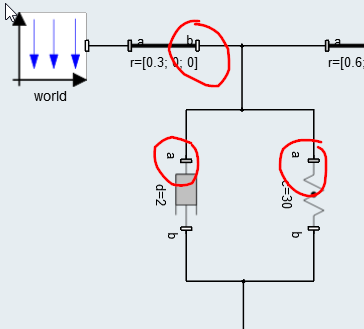
My aim is to simulate a free fall mass with a spring and a hydraulic damping system. I found this element in th demo file SpringDamperSystem.
Thank for the attention.
Arnigaber
Answers
-
Hi Arnigaber,
There is a small difference between your model and the demo SpringDamperSystem. In the demo all mechanical components are taken from Multibody library, you can recognize it by the connectors.
You can't combine Multibody connectors and Translational connectors directly as the direction of Translational isn't defined in space. In that case you have to use a Multibody component that allows the insert of a Translational element, e. g. LineForceWithMass or JointUPS.
Alternatively you can setup your model as a pure 1D system. Replace the world by fixed, and add the gravitation force separately (or use Inclination angle in cylinder).
The demo LandingGear in HydraulicsByFluidon/CoSim shows an example of a passive hydraulic damper, also Monotube damper and Twin-tube damper in HydraulicsByFluidon/CircuitModels.
0 -
Thanks RoKet!
As always very helpful!
/emoticons/default_smile.png' srcset='/emoticons/smile@2x.png 2x' title=':)' width='20' />
0
 Altair Employee
Altair Employee