I want to simulate an Induction Motor using current sources on flux. The circuit I'm using it's attached on a picture.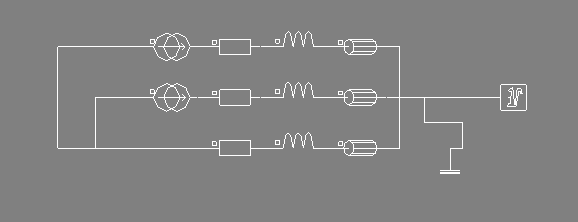
Right now I've set the current sources with sinusoidal waves of current I_a=10*sin(100*pi()*TIME) and I_b=10*sin(100*pi()*TIME-(2*pi()/3)). However the electromagnetic torque curve gives really odd results.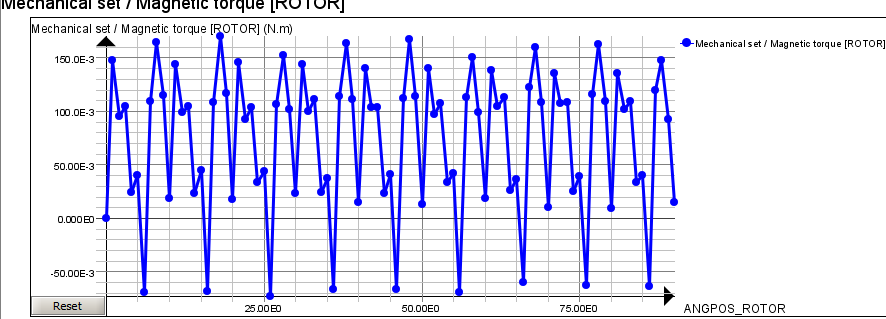
I've attached the Flu file of this motor as well, so you can hopefully find my error cause I'm lost.
I know I can use steady state ac magnetic 2d to simulate this kind of motor, but I wanted to use transient magnetic.
Thanks for your time,
Have a good day.
Unable to find an attachment - read this blog
