Hi Community,
I am currently working on a project to optimize the topology of an robot arm.
Specification is as follows: Rigid bodies, extract forces by using MotionView, optimize robot arm with Hypermesh / Optistruct.
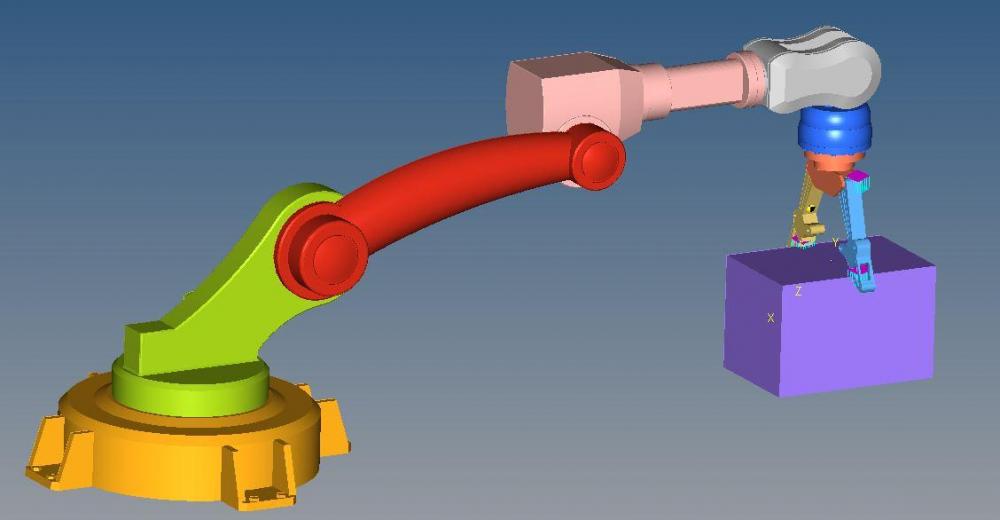
Attached a picture of the roboter, the red robot arm is the one to optimize.
Therefore I made a simulation with MotionView - Robot picks a cube, lifts, rotates and puts it back down, then it rotates back without the cube.
To get the forces acting on this robot arm (or on the 2 joints of the robot arm) I placed 2 Outputs on the joints. Now I used the tutorial MV-3030: Load Export to get these forces.
I tried to import these in Hypermesh to use it for optimization, but I don't know how.
My questions:
- How to get forces / loads from MotionView to Hypermesh?
- Is the procedure I am trying currently correct or is there another way to optimize a part?
- What's the usual procedure to solve a problem like this?
- I found out that there's the Equivalent Static Load Method, but it's only usable with flexible bodies... is there a possibility to use it with rigid bodies?
Thanks in advance and best regards,
Flo
<?xml version="1.0" encoding="UTF-8"?>